Oof
Oof
Oof
Drive practice
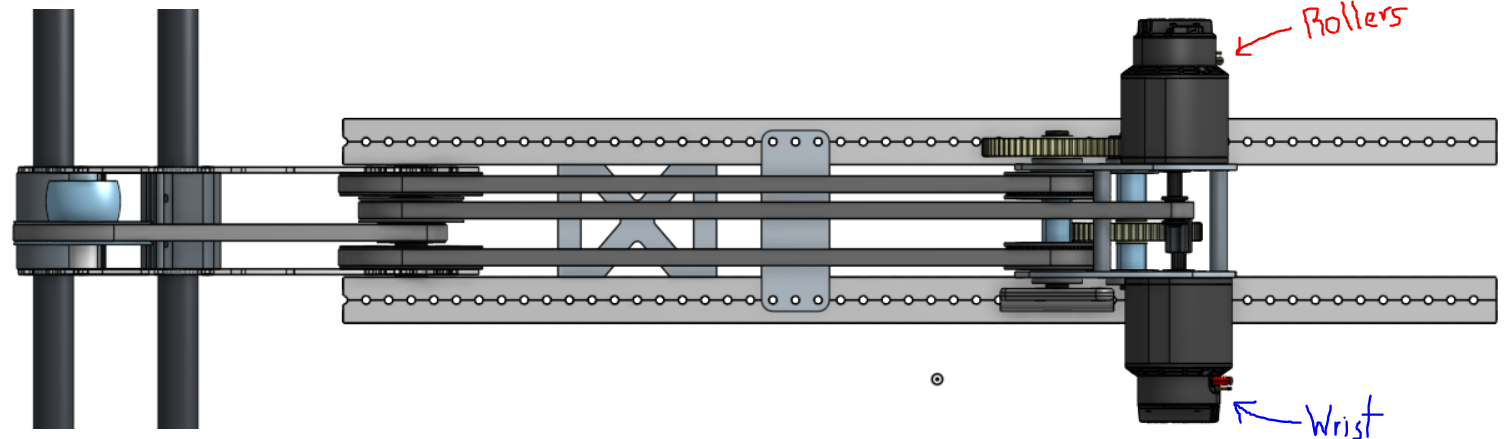
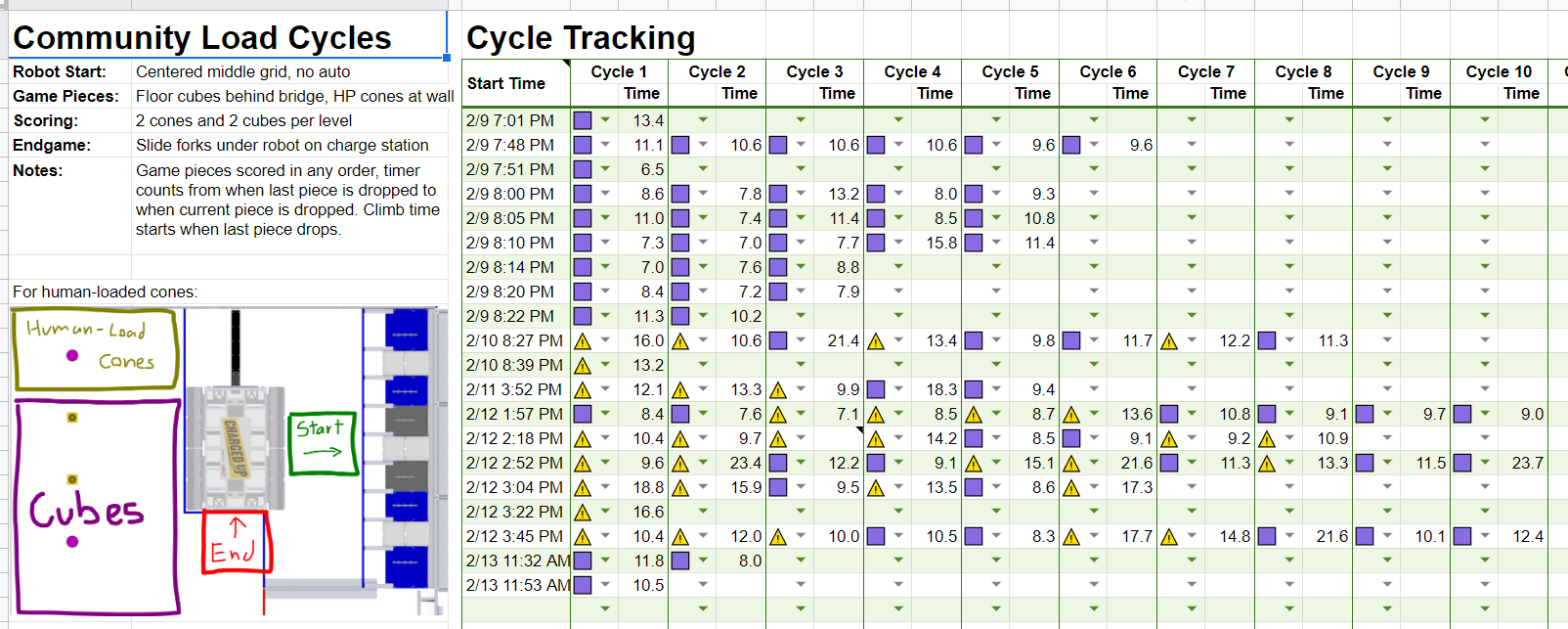
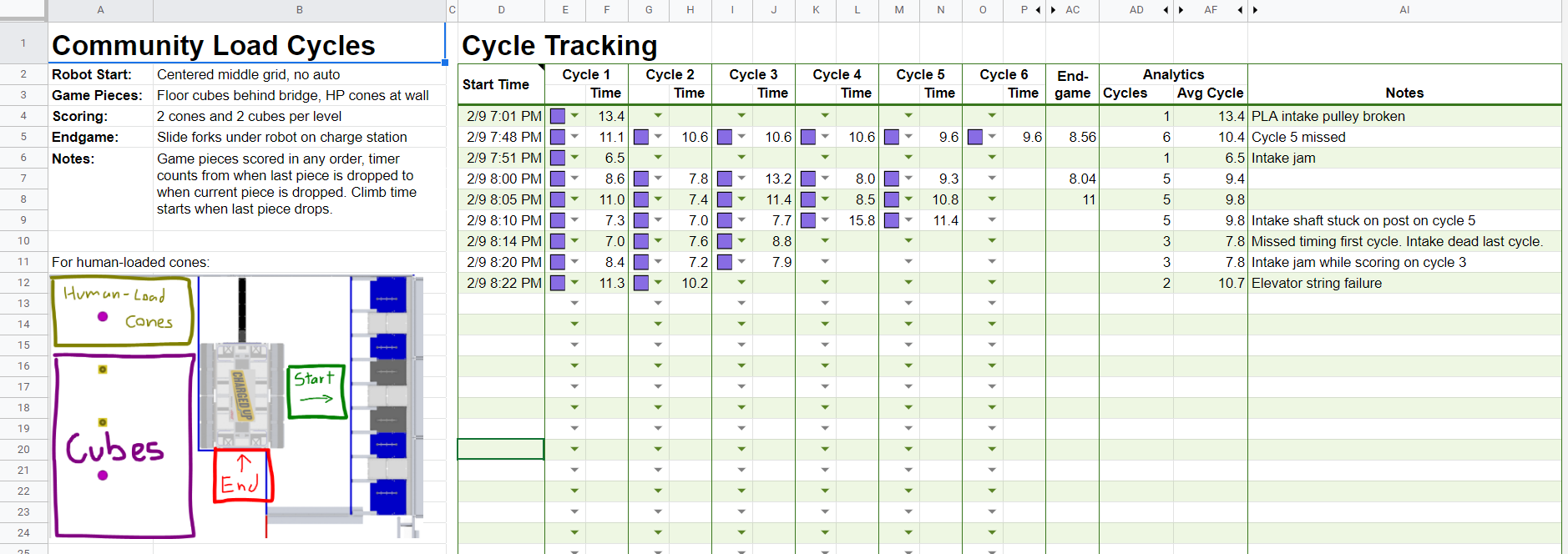
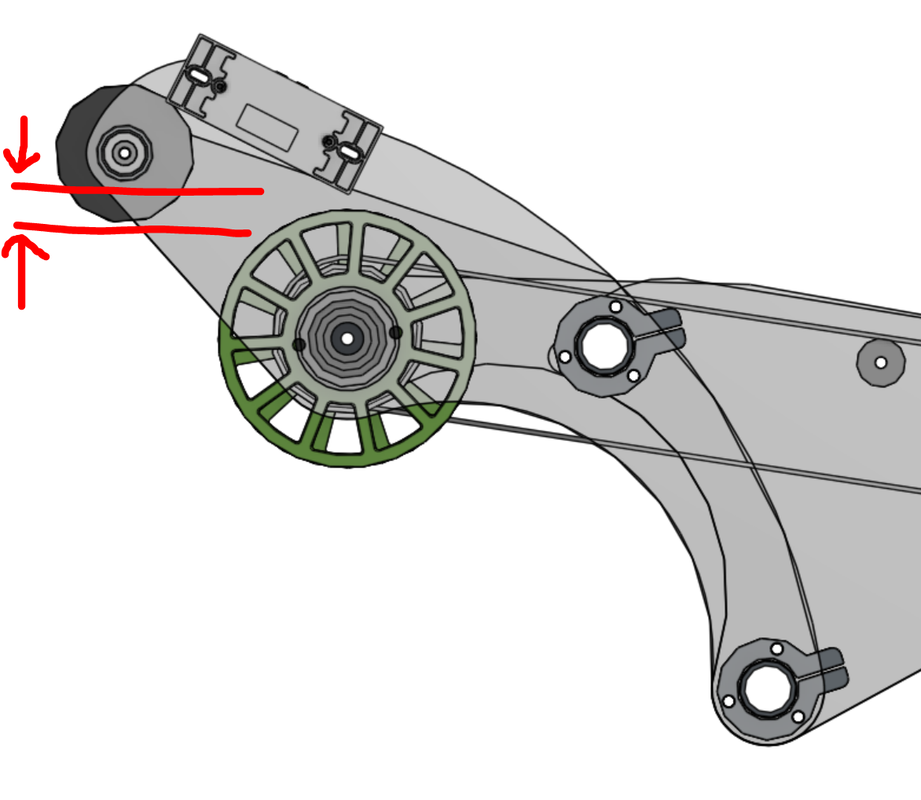
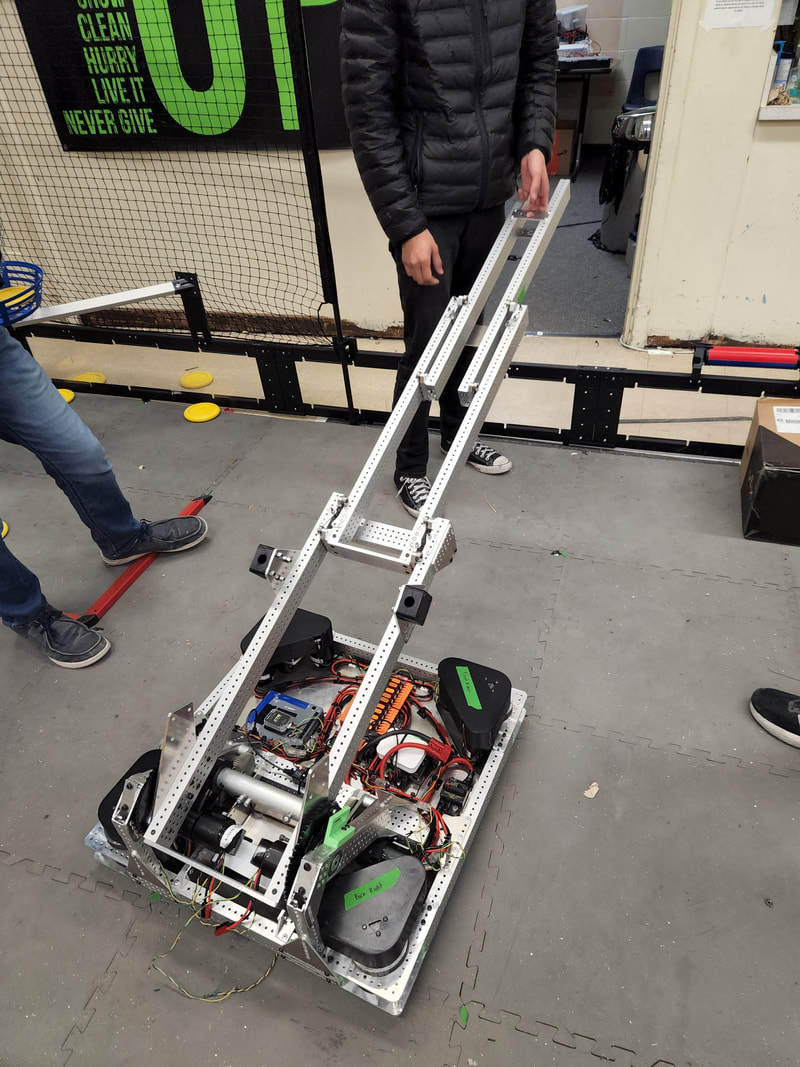
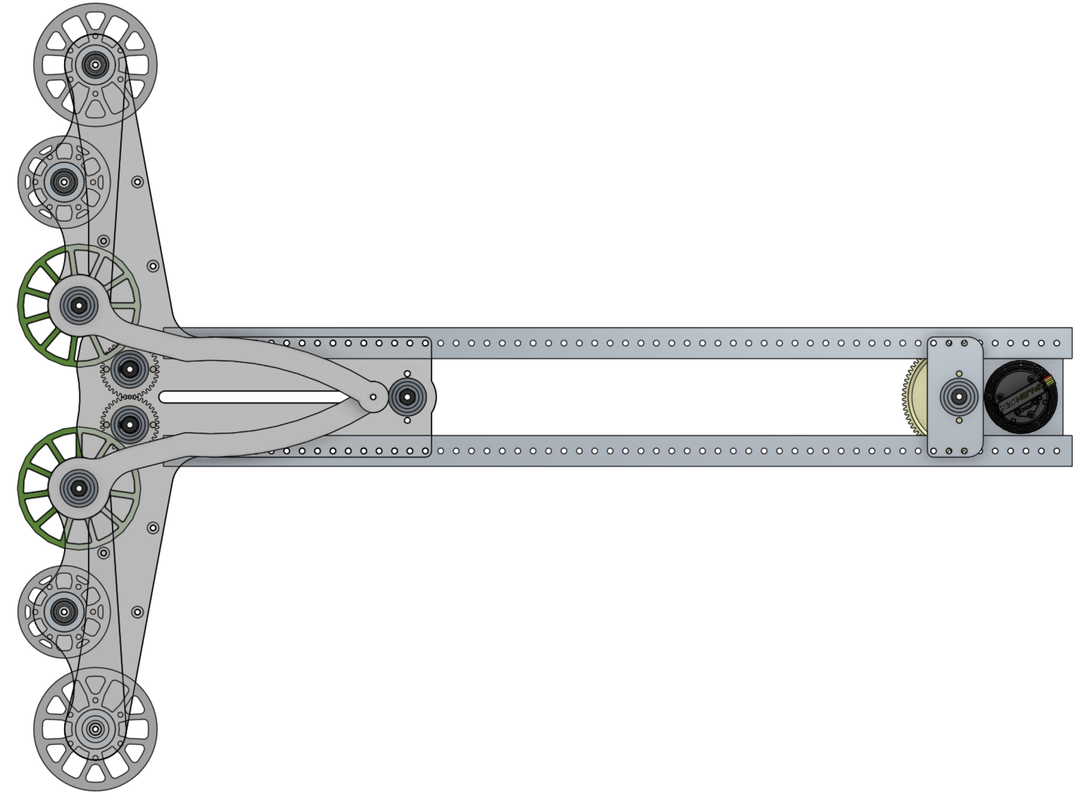
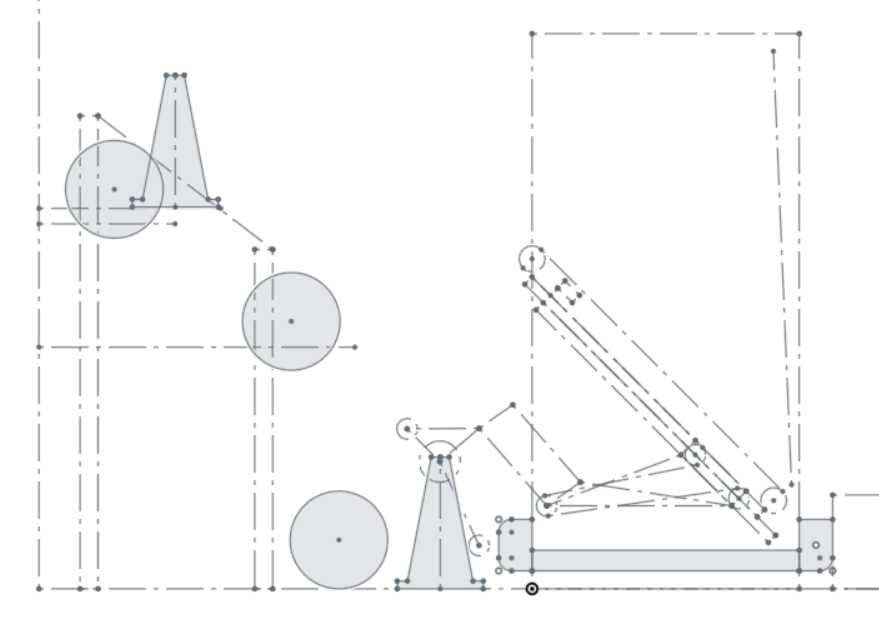
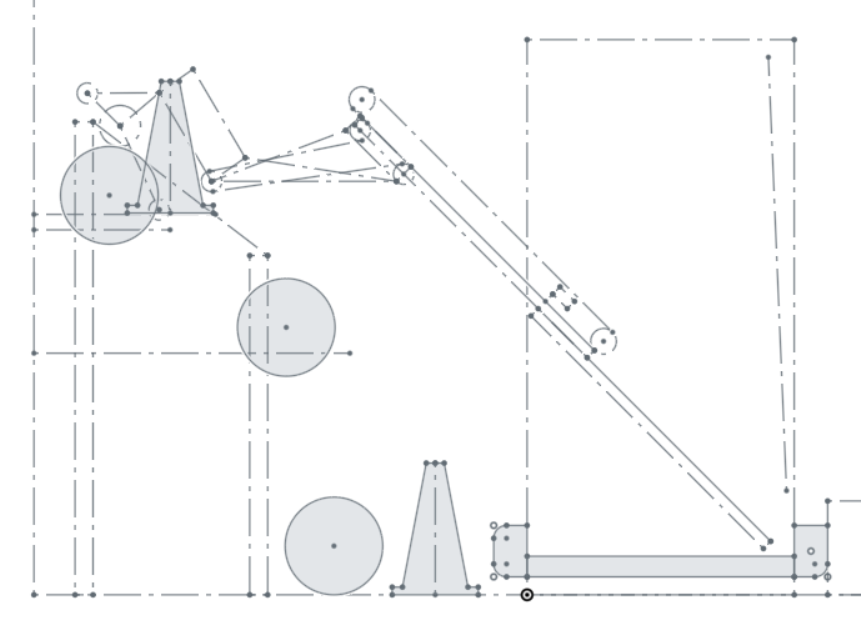
We're finally running full-field cycles in practice. Cone pickup from the shelf looks reliable, and Yi and Emma are working well together as a drive team. Unfortunately, the wrist belt is still killing us. At the end of the Thursday meeting we finally swapped it out for a #25 chain. Hopefully this should run more reliably.
 |  |
(before)
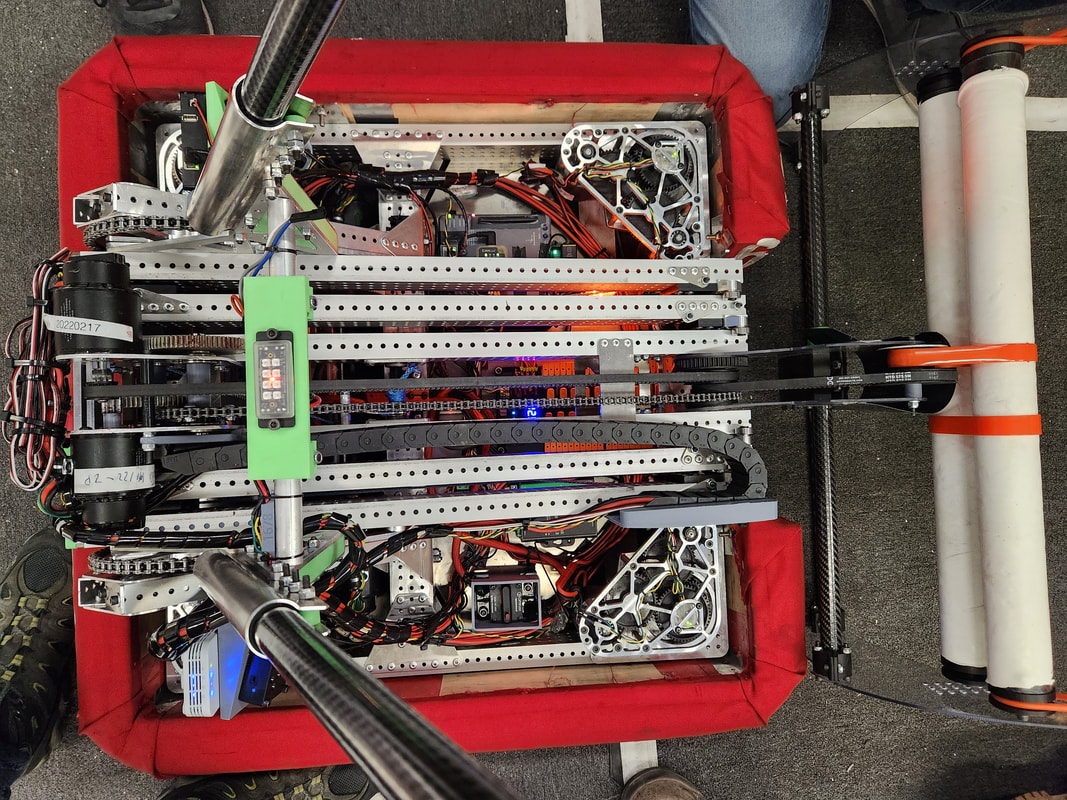
(after)
Auto
Comp finally has a two-piece and balance auto. We're still pushing for a three-piece auto by Hueneme, but this is looking tough. We need to pull a lot of time out of the current program to make it work.
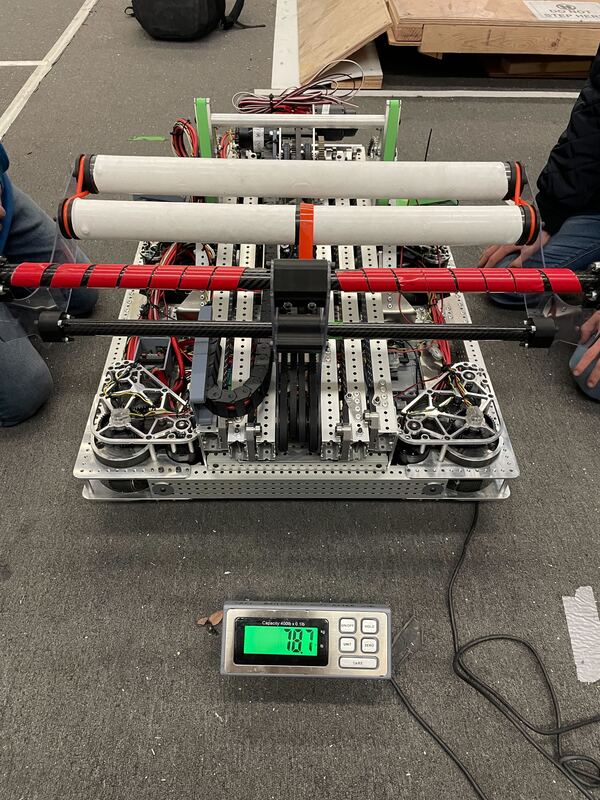
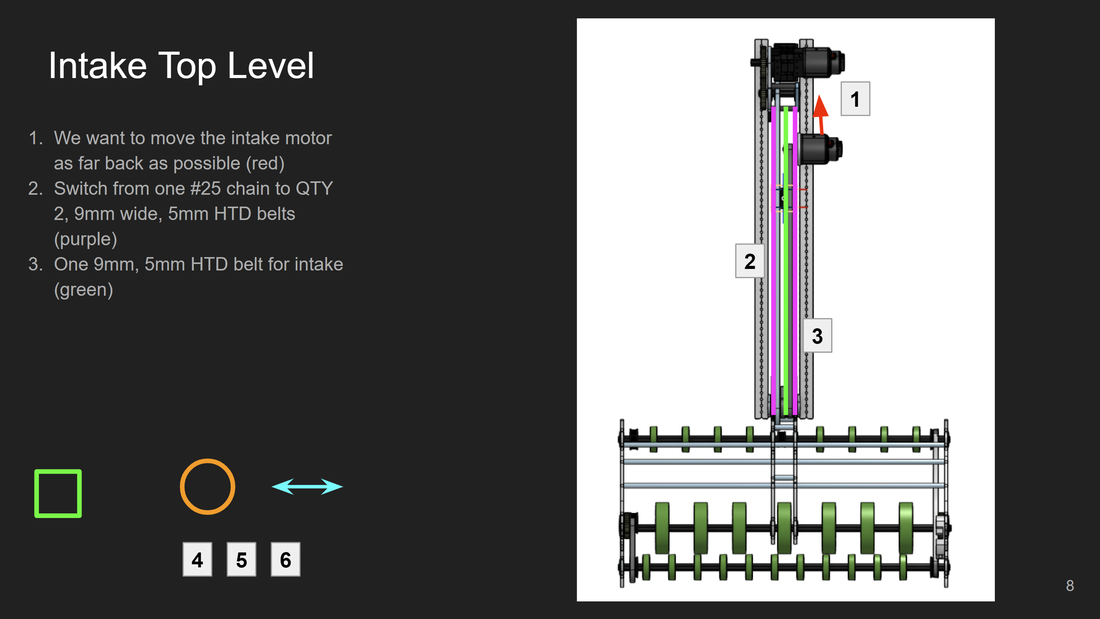
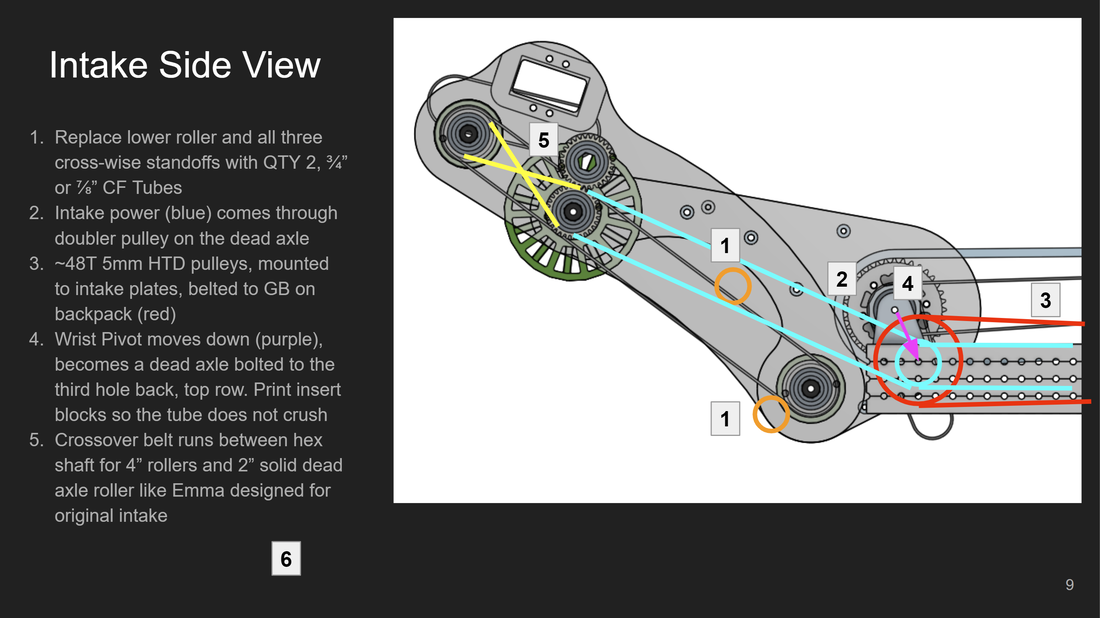
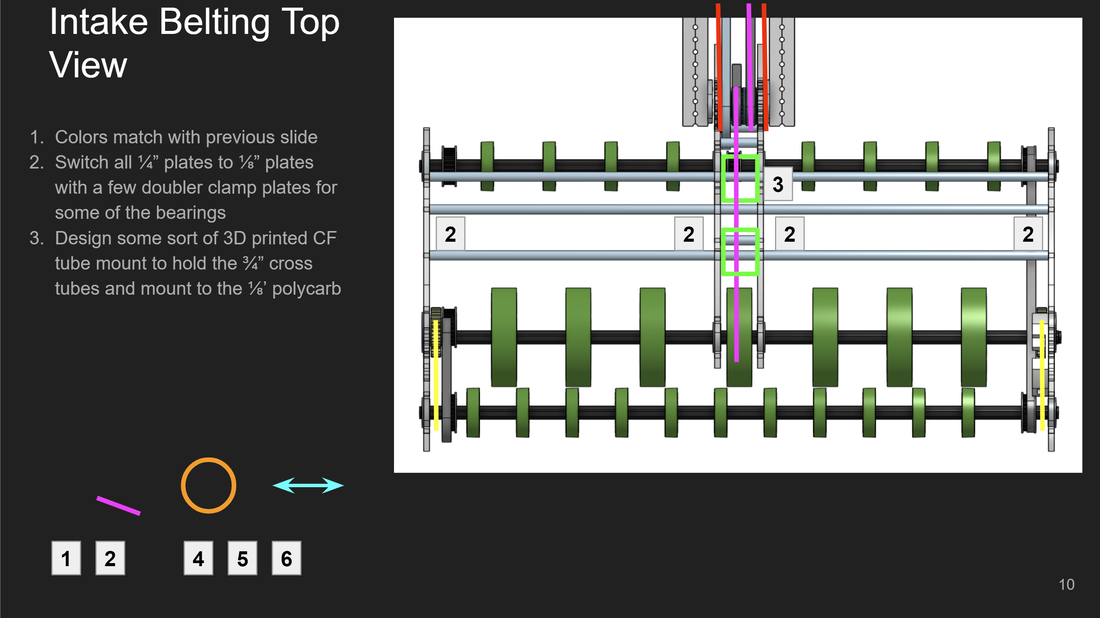
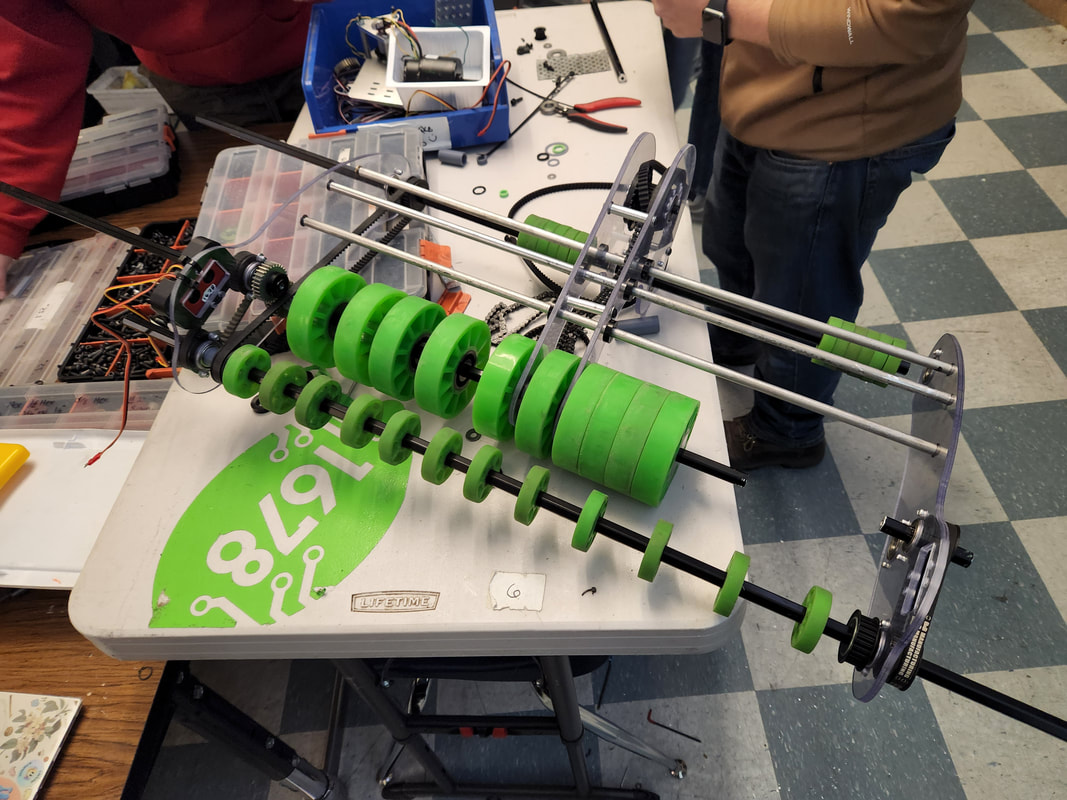
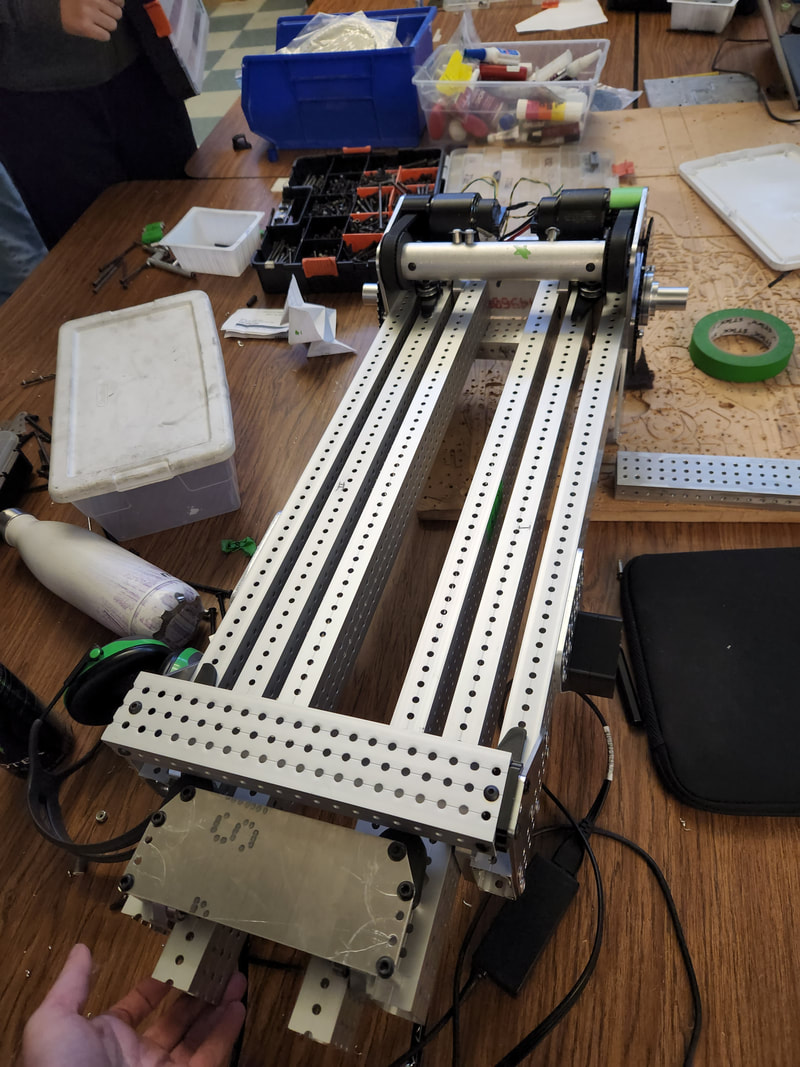
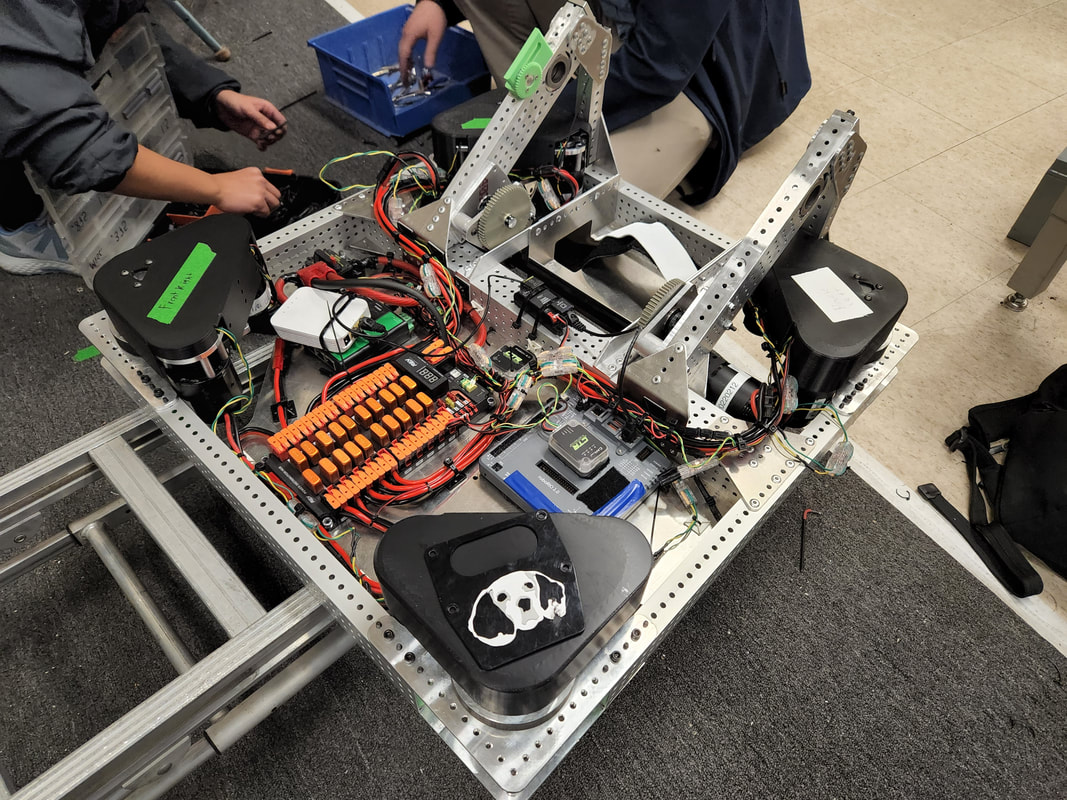
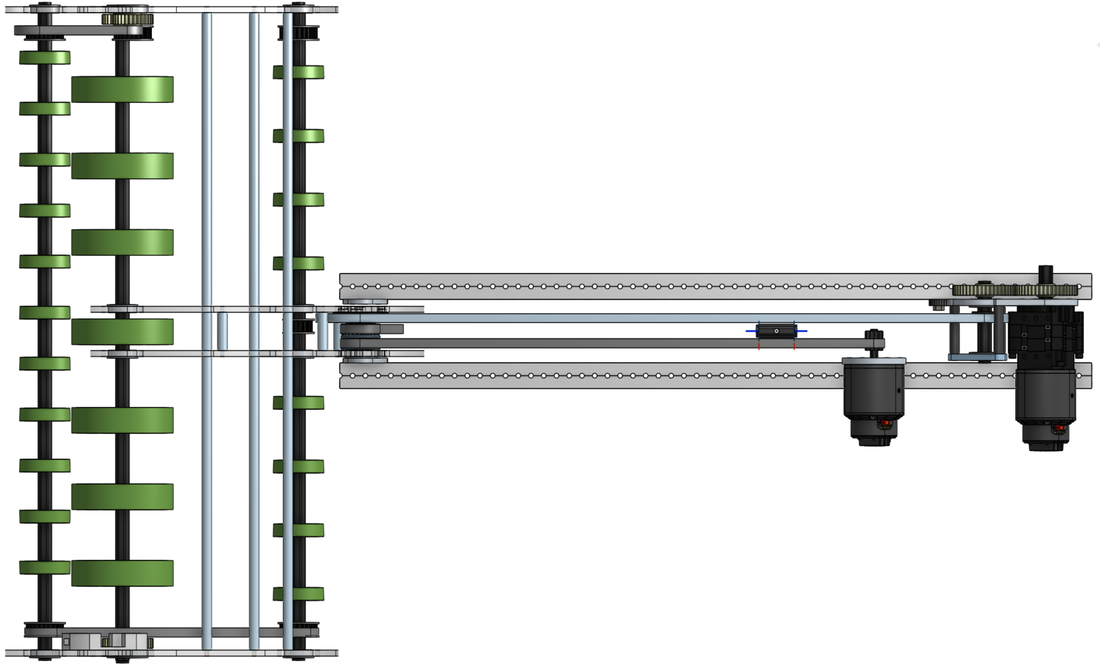
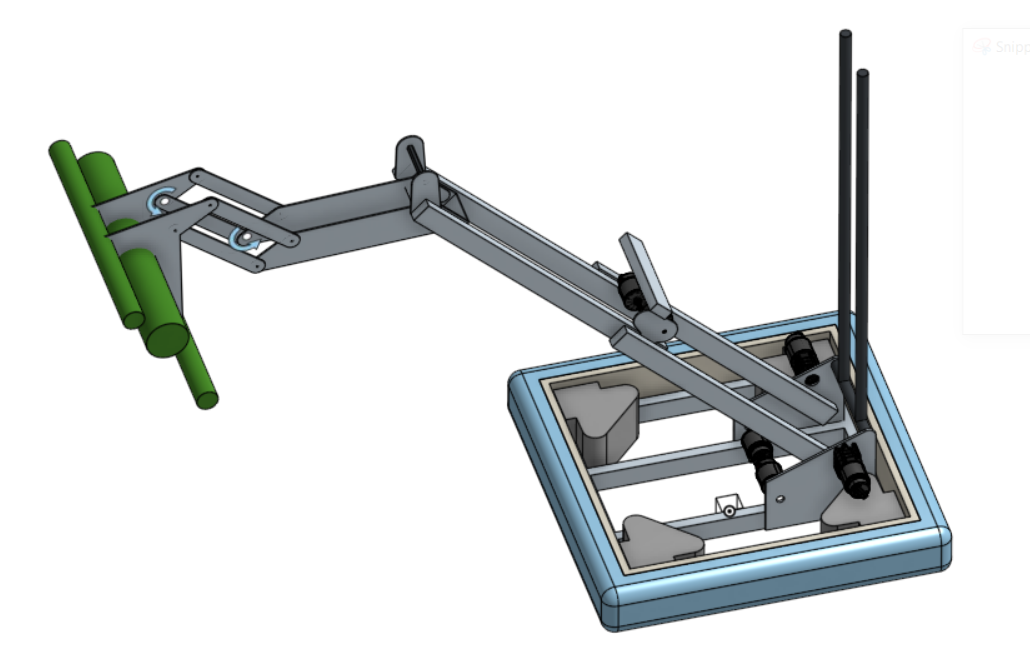
R2B2 Build
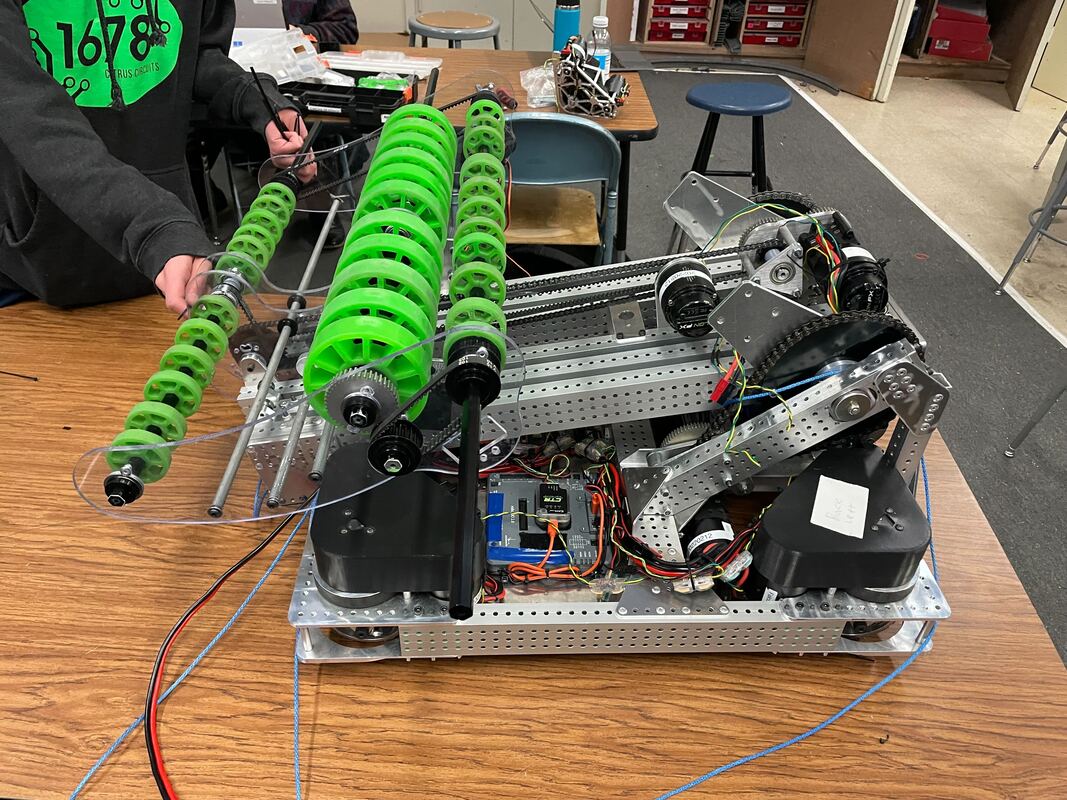
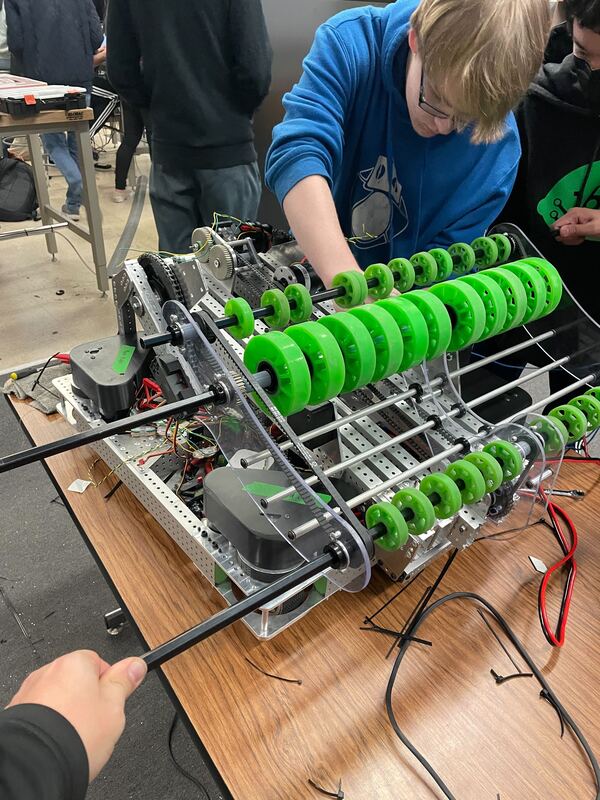
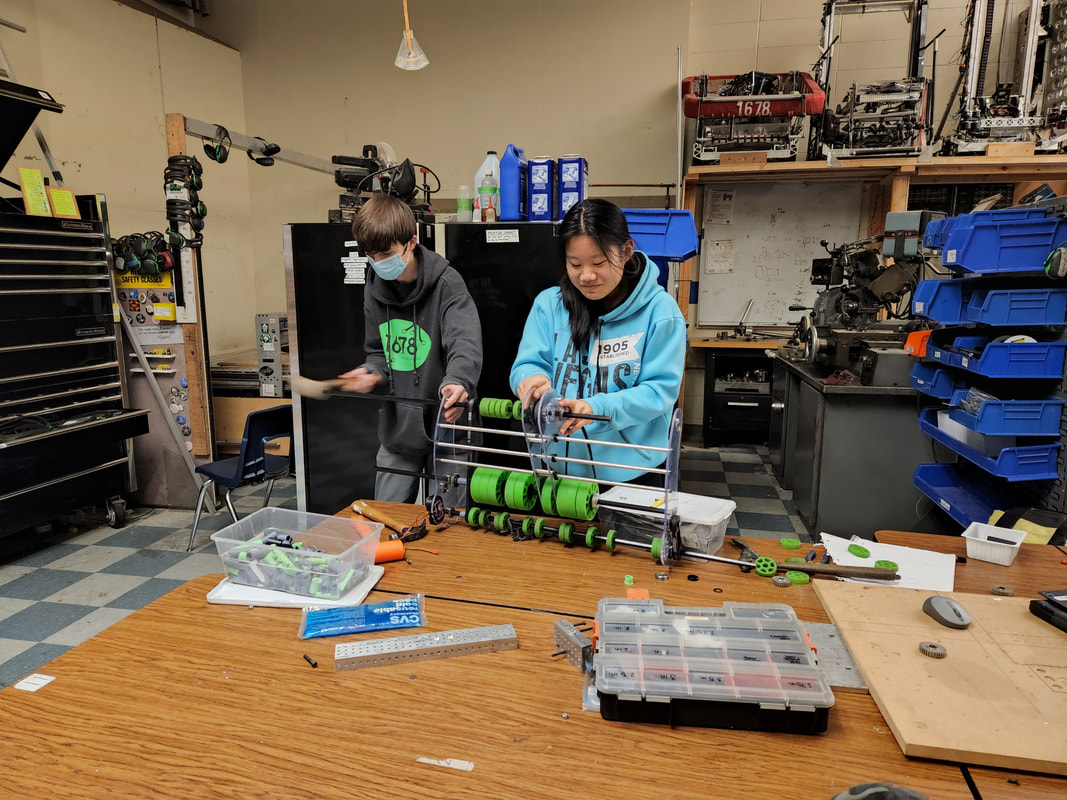
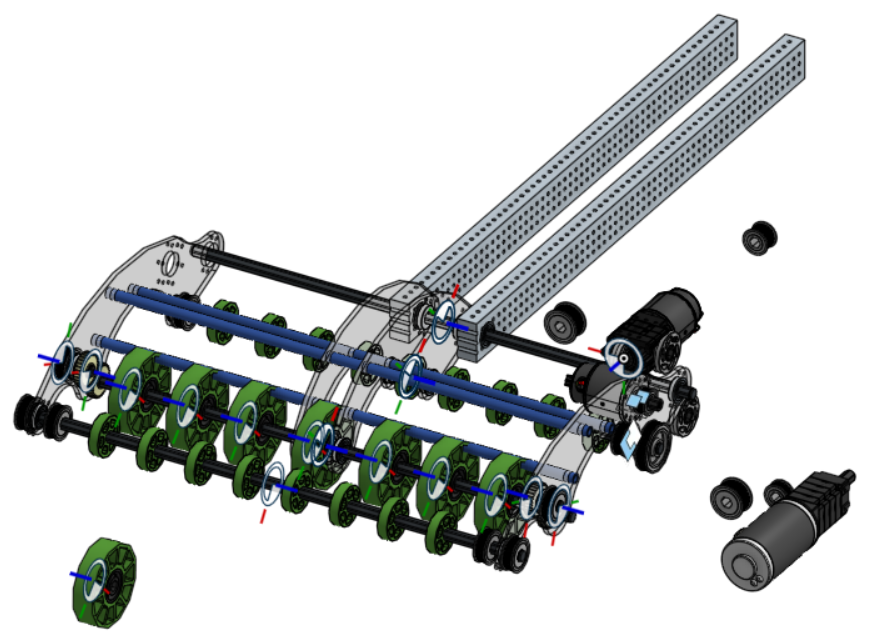
Beta's rebuild into Beta 2 (R2B2) is coming along. It will be the first robot to get the V4 Everybot intake, which should be more reliable with cubes. It also has the lower roller driven by a timing build instead of flat polycord, which will transfer torque better.

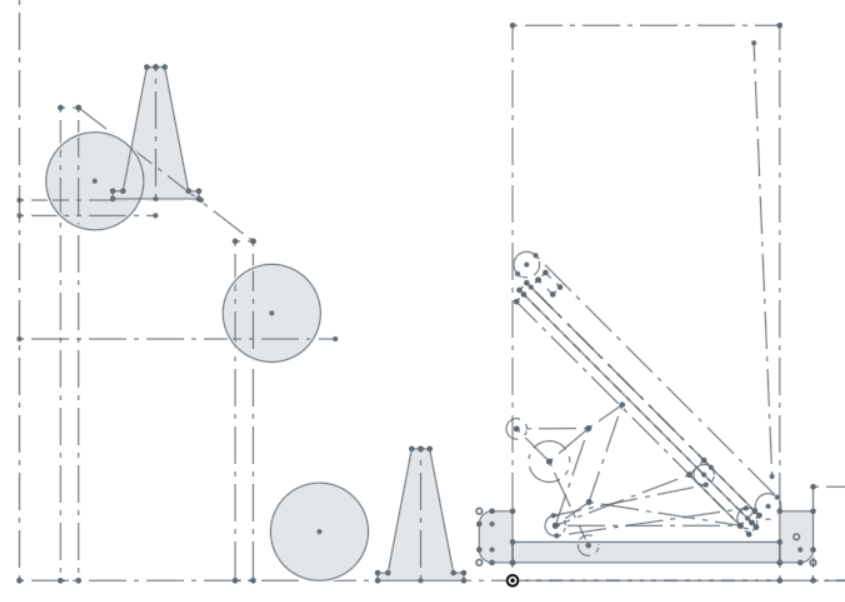
Field Build
Finally, after seven long weeks of work and a lot of trial and tribulations, we finally have a single substation ramp. Go Citrus!












 RSS Feed
RSS Feed