Are we building the wrong thing?
Mike and Dave sat down and looked at our architecture, and started to confront the idea that in order to keep inside our frame perimeter, we have to keep the arm up. 1678's design principles are focused on being low and fast, but Beta's design means we can never cross into an opponent's protected zone, and have to have a game piece (and mechanism) held outside the frame perimeter in order to keep low. We can solve these by putting the intake on a wrist, but that means putting a rotating DOF on our linear DOF on a rotating DOF. There's a lot of room for failure there. Those are major red flags for us.
We're looking at a new architecture for an Epsilon robot. Mike drew up a layout sketch, Brendan made a Crayola CAD robot, and it looks like a more solid architecture than Beta. We did this same type of redesign last year, but this change is more dramatic.
Mike and Dave sat down and looked at our architecture, and started to confront the idea that in order to keep inside our frame perimeter, we have to keep the arm up. 1678's design principles are focused on being low and fast, but Beta's design means we can never cross into an opponent's protected zone, and have to have a game piece (and mechanism) held outside the frame perimeter in order to keep low. We can solve these by putting the intake on a wrist, but that means putting a rotating DOF on our linear DOF on a rotating DOF. There's a lot of room for failure there. Those are major red flags for us.
We're looking at a new architecture for an Epsilon robot. Mike drew up a layout sketch, Brendan made a Crayola CAD robot, and it looks like a more solid architecture than Beta. We did this same type of redesign last year, but this change is more dramatic.
Epsilon
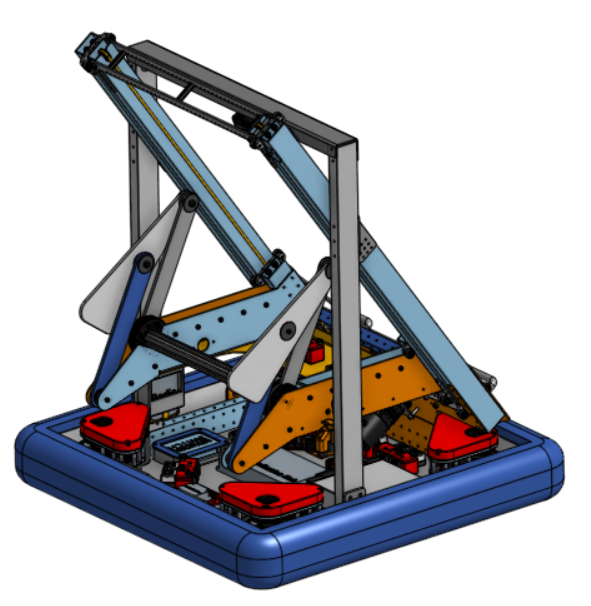
This is Epsilon's architecture. It only has two DOFs, stays within its frame perimeter while moving around the field, and should keep a lower CG than Beta while scoring on the high peg.
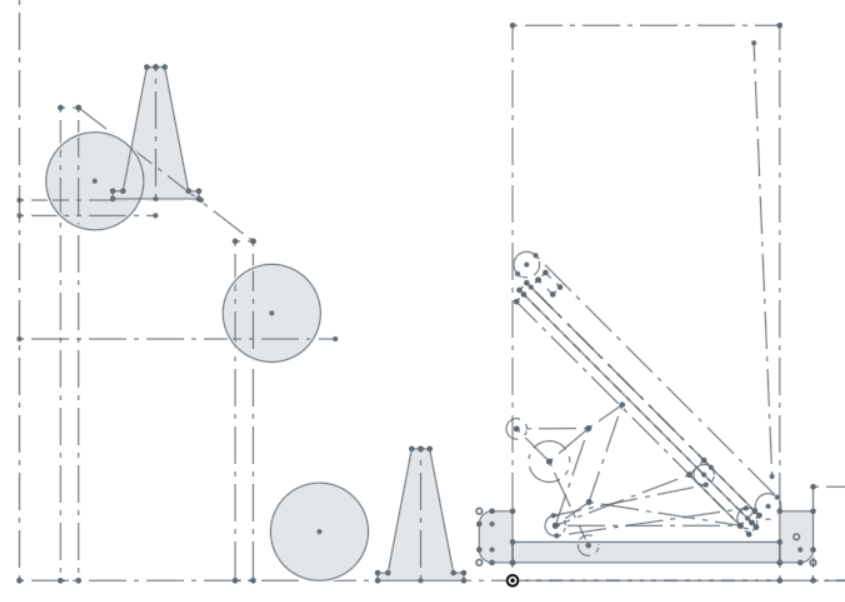
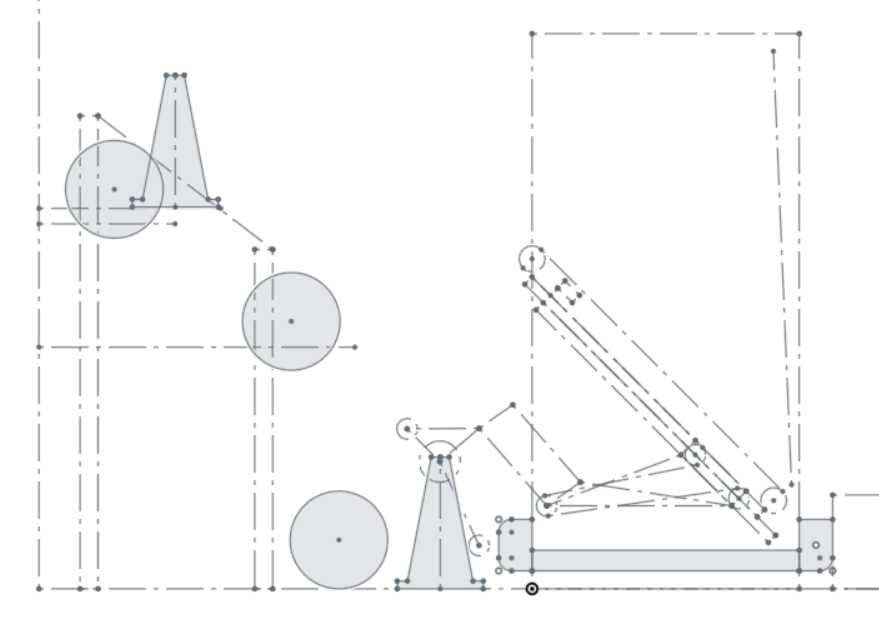
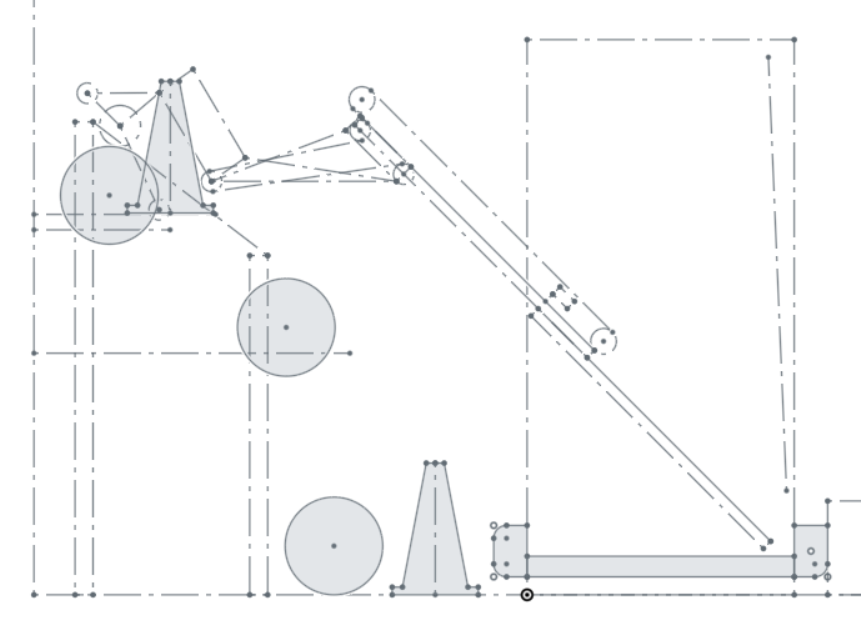
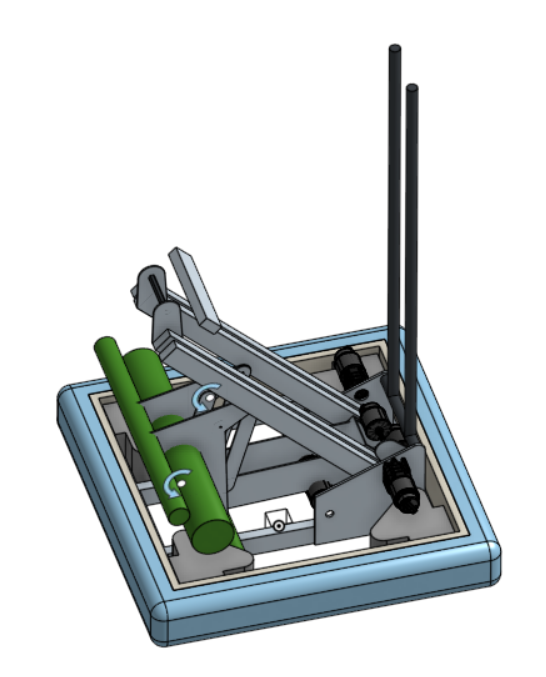
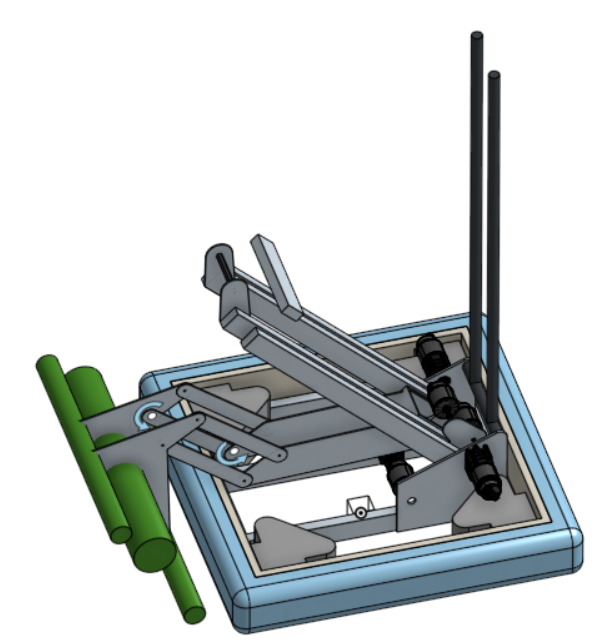
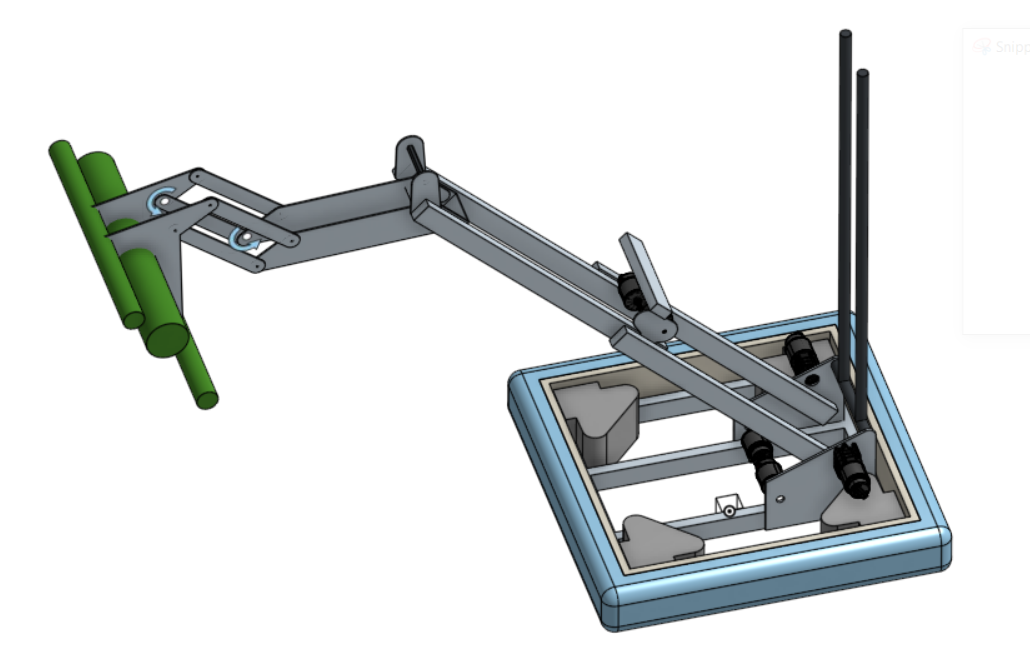
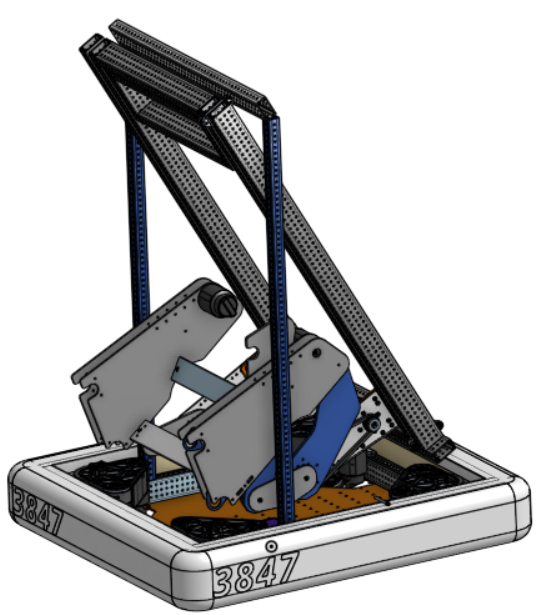
Epsilon is a cascade elevator with a four-bar intake. The rear forks will have to be separately powered (which is a downside), but both motors on the intake can be placed in a "backpack" on the first stage of the elevator, with powered belted out to the intake using a similar system to CoreXY 3D printers. Open Alliance teams 2713 and 3847 are both working with similar designs, which gives us some reassurance that it's a reasonable idea.
 |  |
Beta
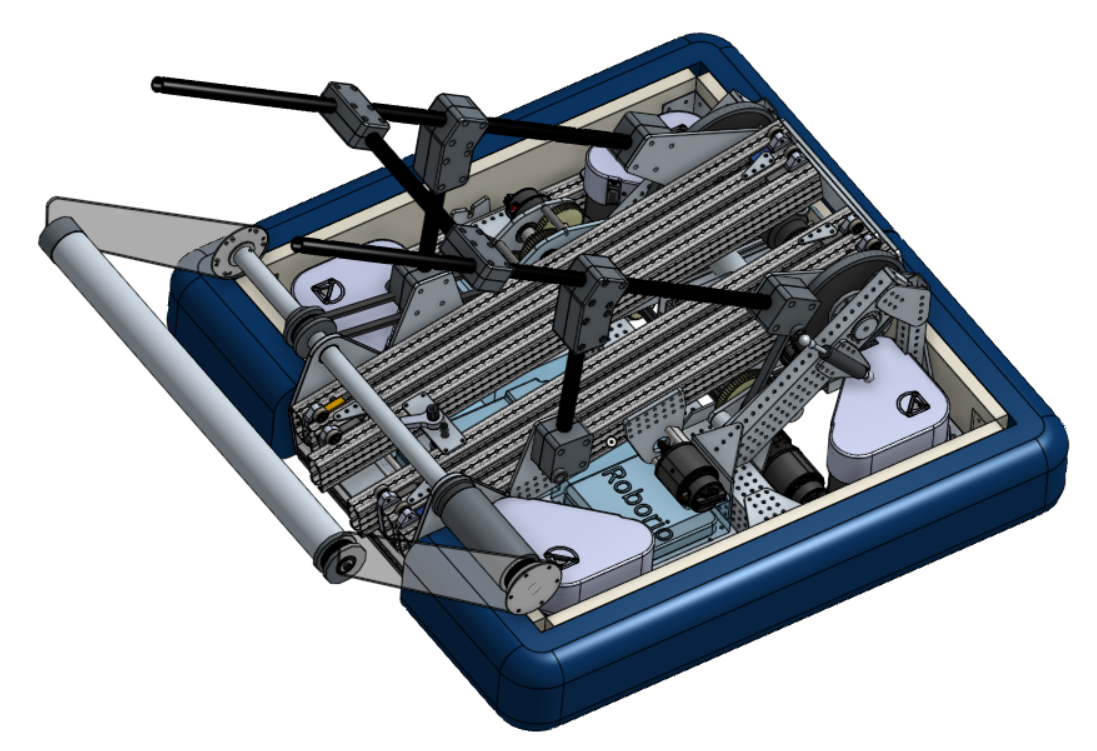
Even though we're moving forward with Epsilon, progress isn't stopping with Beta. Beta will still be needed for serious drive practice and autonomous programming. Alpha hasn't been all that helpful with either task, thanks to its floppy, ungainly arm.
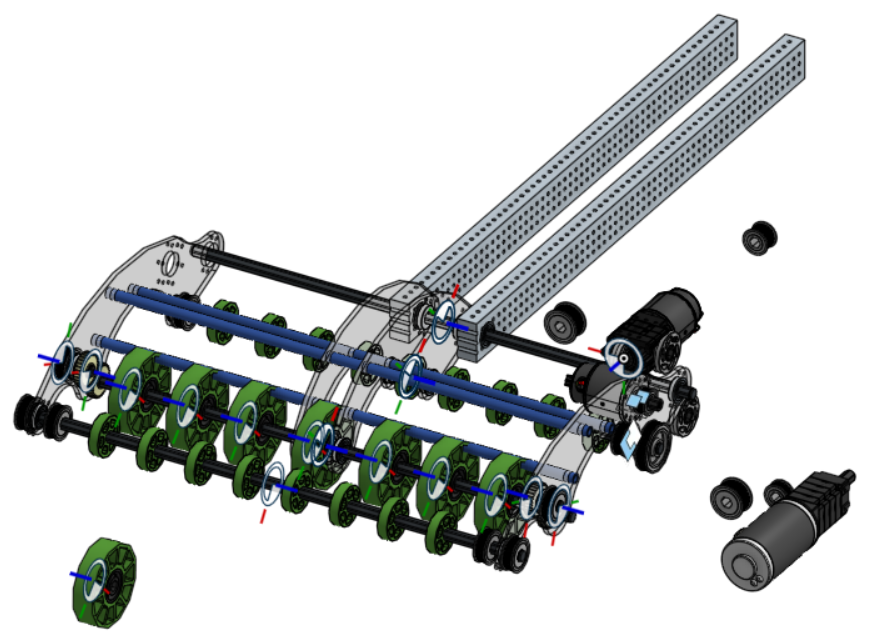
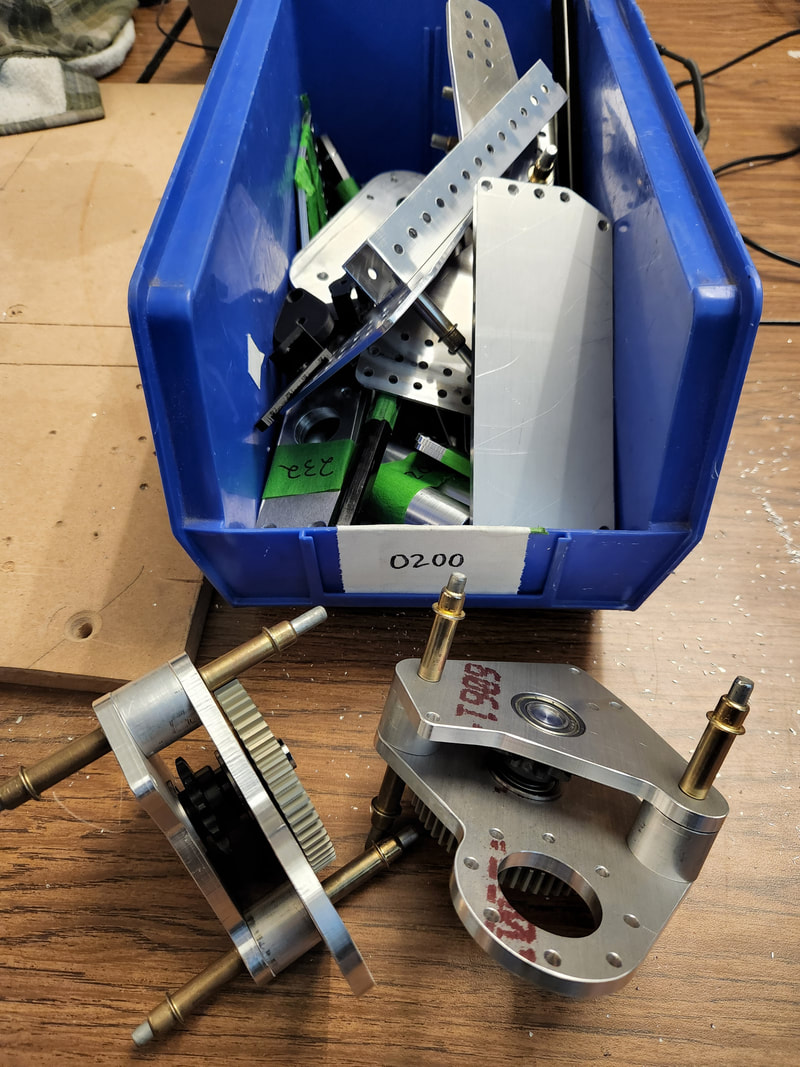
Beta's elevator is getting better detailed out (it has ropes and a beefy axle setup using lessons learned from 2016), Big J got the clamping blocks for the endgame forks made and mated in place, and Kina and Taye started making a less prototype-y version of the Everybot intake.
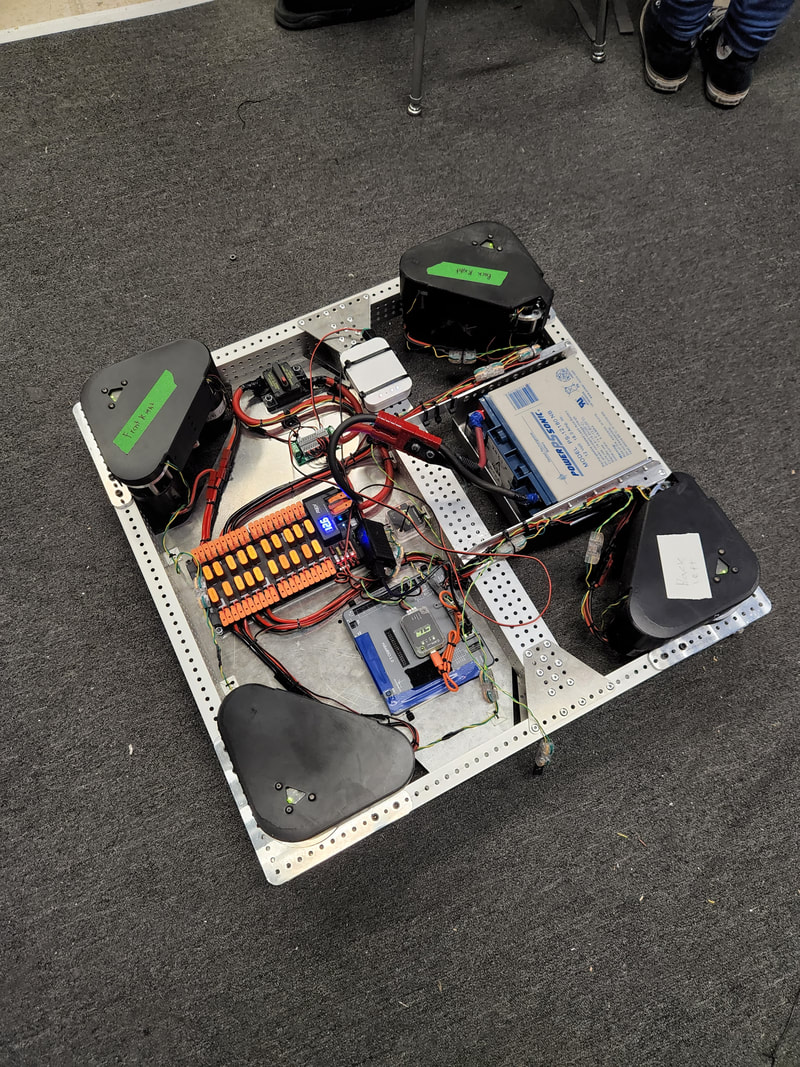
Stephen and the fabrication team have been working on producing parts for Beta, and are starting to get some subassemblies together.
Beta's elevator is getting better detailed out (it has ropes and a beefy axle setup using lessons learned from 2016), Big J got the clamping blocks for the endgame forks made and mated in place, and Kina and Taye started making a less prototype-y version of the Everybot intake.
Stephen and the fabrication team have been working on producing parts for Beta, and are starting to get some subassemblies together.
 |  |
 |  |
Seeing a new robot come together is the most exciting part of the year, but needing to pull a complete architecture switch in a week or two is going to be a very hard lift for Brendan and the design team. There are going to be some long days and late nights in the coming weeks.
 RSS Feed
RSS Feed