It works!
Beta
Rohan, Aunish, Hiroshi, and Raf got Beta wired up and into the Software Robot teams' hands. Yi got all of the individual degrees of freedom working, along with a first pass at set points for the elevator, arm, and intake. On Sunday, Beta made its first complete climb. There are still some minor mechanical parts to install, but this is nearly complete. We're also not excited about the string wrap onto the drum (it overlaps itself sometimes), so we might make Comp's drum larger diameter.
We spent some time playing with the intake. Note that the perspective on this video is a little confusing. The intake is in its "tucked" position with the elevator up, so it's upside down from its usual orientation. The climb forks have pool noodles on them to keep anyone from injuring themselves on them.
By the end of Sunday we were able to score our first game pieces. This means that we can start programming autos and running drive practice in earnest. By this point last year we had dozens of hours of drive practice, and this year we have none. We have the same driver this year as last year, but our operator Emma will be behind the glass for the first time at Hueneme, and this is a hard robot to operate.
Comp
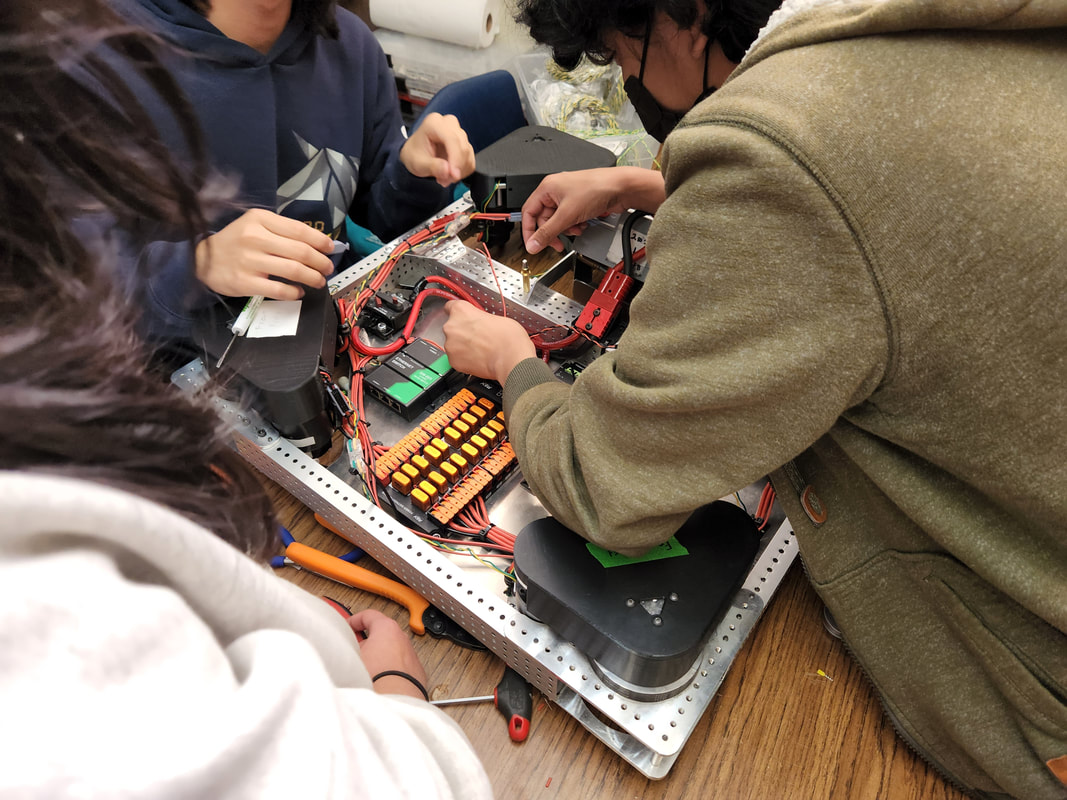
The Hardware Design and Fabrication teams got Comp's drivebase built, and Hardware Electrical started getting it wired up. We hope to have it built next weekend.
 RSS Feed
RSS Feed