Re-Arranging the Shop
For 2022, we had about 2/3 of a field. It was just enough space for a driver station, climber, and a hub, with a little room behind the hub to drive though. This year we need the full length of a field, which means we won't be able to have the full width of the field. We re-arranged M2 (our primary work space) to fit the parts of a field that we will use the most in competition, although we could only fit with the blue alliance configuration rather than the red alliance configuration (since it's a mirrored field this year.)

Driving Alpha
Alpha started driving (slowly) for the first time today. The arm is a bit hard to control, but luckily we're ahead of schedule so software has time to fix it.
More Prototypes
At this point, some teams have done enough prototyping to start moving onto CAD for Beta. The Beta robot should represent something close to a final design. A few groups are still working through prototypes though.
Group 3
Student Lead: Sam and Vamsi
Task: Build a manipulator for the arm that can right a tipped cone
Saturday Progress:
Student Lead: Sam and Vamsi
Task: Build a manipulator for the arm that can right a tipped cone
Saturday Progress:
- Tested cones at 60psi (It worked)
- Grabs cube with 40psi
- ran tests on the cube, found out that it has trouble grabbing from an angle.
- Started new plate to be laser cut that will have more holes to make it easier testing different compressions.
Group 4
Student Leads: Daniel and Taye
Task: A wide wrist with a +/- 90° twist to pick up and re-orient cones.
Saturday Progress:
Student Leads: Daniel and Taye
Task: A wide wrist with a +/- 90° twist to pick up and re-orient cones.
Saturday Progress:
- For cones we found a double bar intake worked best
- The bottom bar was preferably a smaller bar with larger compliant wheels on the top
- Star wheels didn’t work
- Found 9” center distance worked best
- Using surgical tubing to passively compress the cones
| | |
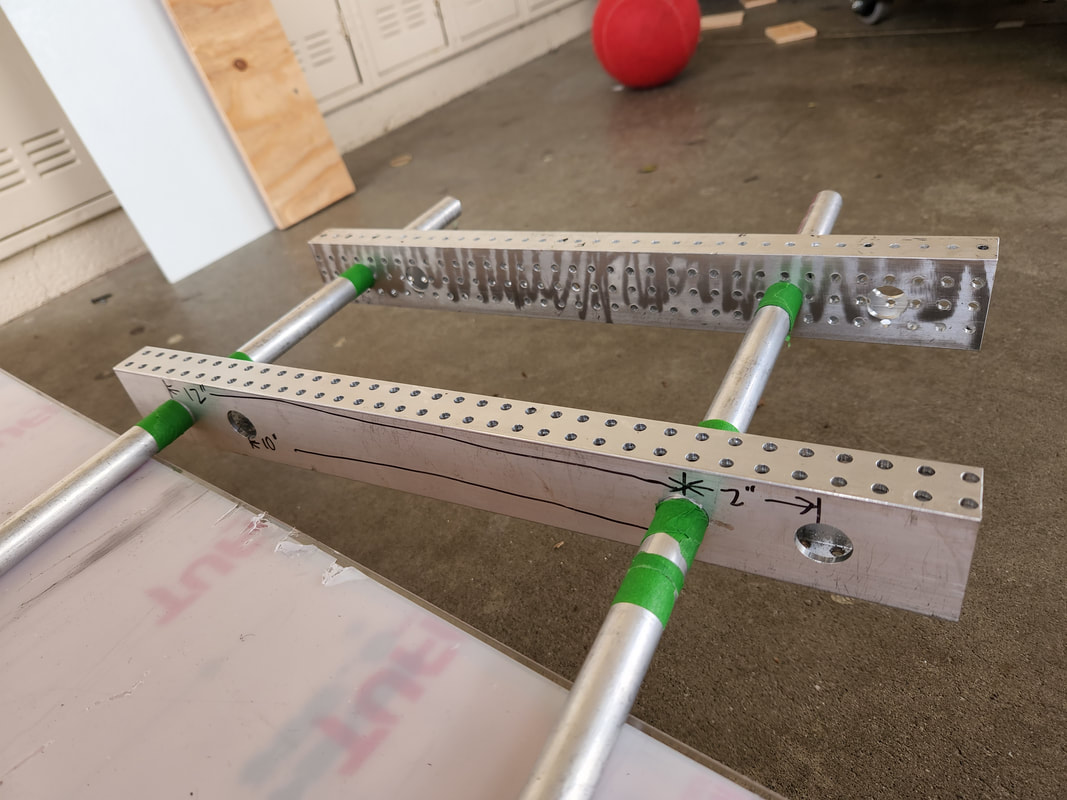
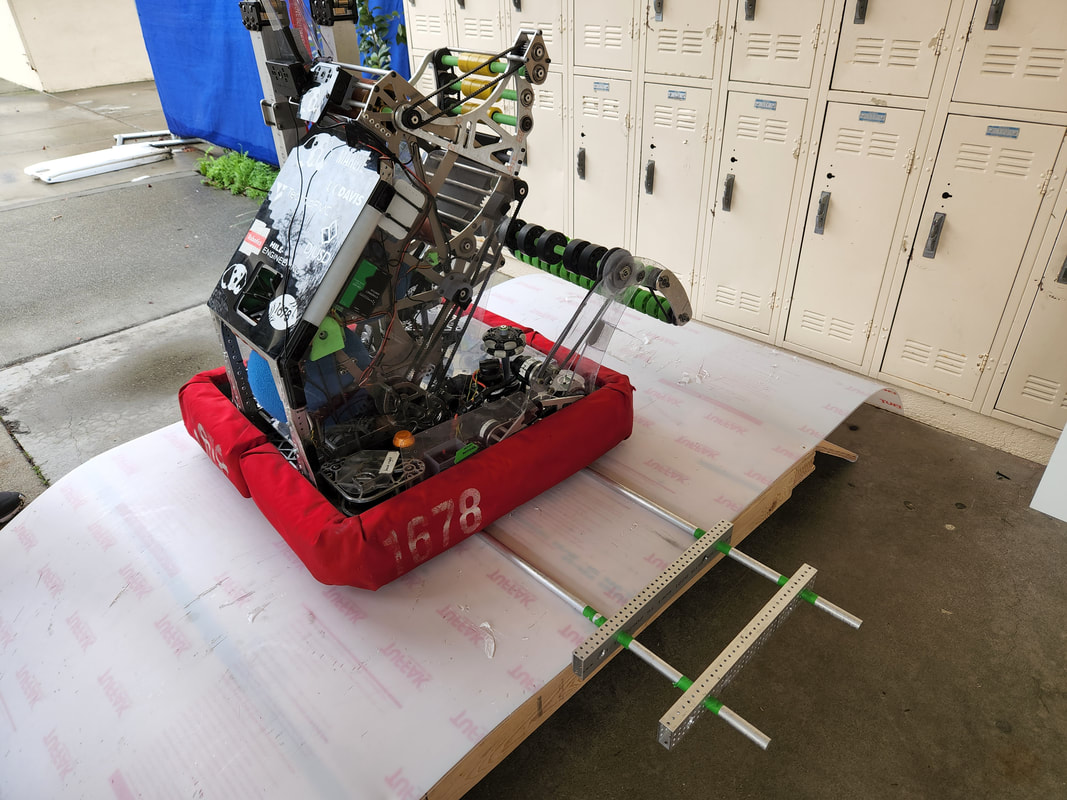
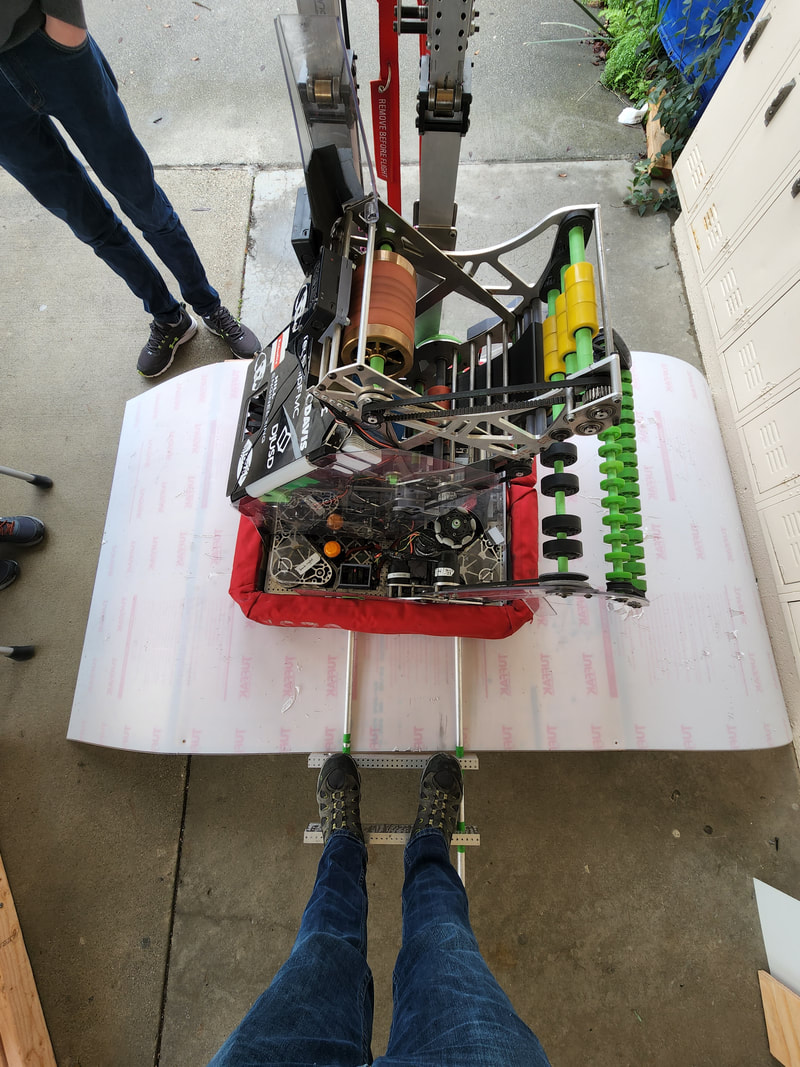
Group 6
Student Lead: Big J
Task: Endgame shenanigans
Saturday Progress: Built some forks to test the physics of our climb concept, with our 2022 robot as a counterweight. This worked great, and now we need to design the real one, and make it out of carbon fiber.
Student Lead: Big J
Task: Endgame shenanigans
Saturday Progress: Built some forks to test the physics of our climb concept, with our 2022 robot as a counterweight. This worked great, and now we need to design the real one, and make it out of carbon fiber.
 RSS Feed
RSS Feed