Crayola CAD
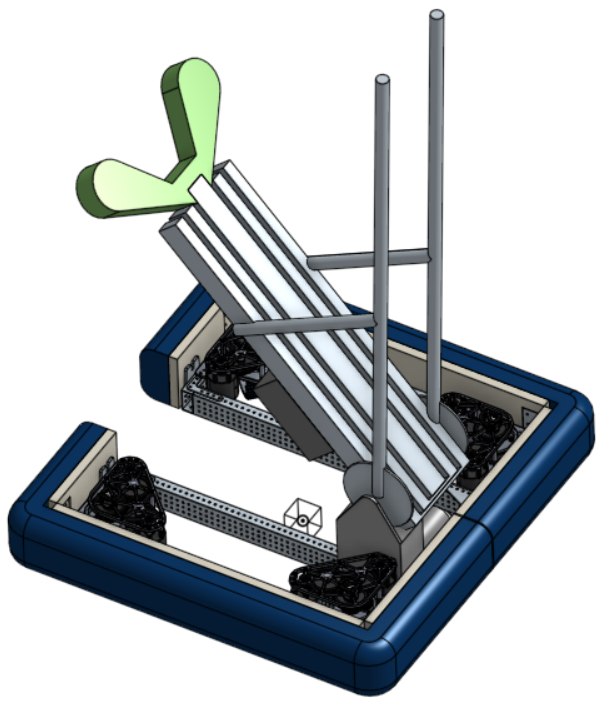
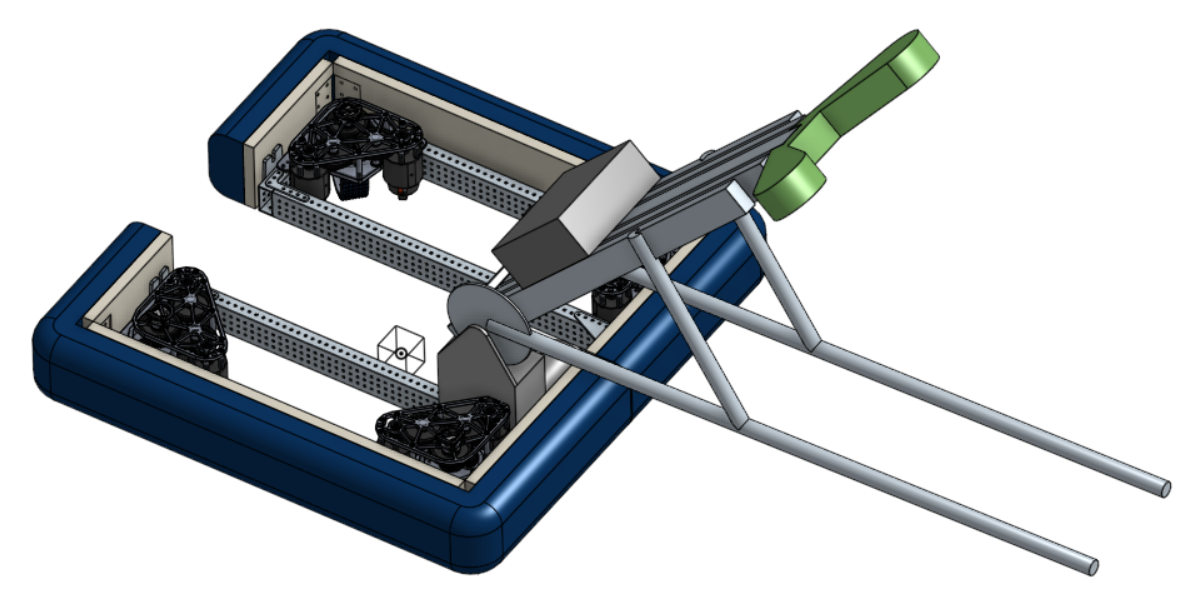
Today, Brendan took the layout sketch and finished a block model of the robot, showing how the robot can reach everywhere it needs to. This model will help us define subsystems, dimensions, and interfaces.


Prototyping - Pt. 2
Thursday mostly consisted of more prototyping. Here's how things are going:
Group 1
Student Lead: Emma
Task: Over-bumper cube intake to handoff cubes to the arm.
Thursday Progress: Built better setup for testing
Student Lead: Emma
Task: Over-bumper cube intake to handoff cubes to the arm.
Thursday Progress: Built better setup for testing
- Originally 8.5" from the ground, now 9.5"
- C-C Dist between the 2 center shafts of the claw to the intake roller is 14.25", but works with less.
- Tested the hand-off with Prototype Team 5's claw
- Tested 2" and 4" compliance wheels to prevent dead spots from existing
- tested intaking cubes from the very edge of the intake

Group 2
Student Lead: Brendan
Task: Alpha
Thursday Progress: Alpha's arm is mounted and the cross-bracing is attached.
Student Lead: Brendan
Task: Alpha
Thursday Progress: Alpha's arm is mounted and the cross-bracing is attached.
| Group 3 Student Lead: Sam and Vamsi Task: Build a manipulator for the arm that can right a tipped cone Thursday Progress: Built a higher-quality prototype. It grabs cones well enough, but still doesn't rotate passively very well. | |
| Group 4 Student Leads: Daniel and Taye Task: A wide wrist with a +/- 90° twist to pick up and re-orient cones. Wednesday Progress: | |
| Group 5 Student Leads: Kina and Michael Task: A spring-loaded side-roller intake to center and pick up cones and cubes Wednesday Progress: Tested a few roller configurations with team 1's intake. Started planning a new version with a horizontal row of rollers on a pivot that should do a better job pinching both cones and cubes. | |
 RSS Feed
RSS Feed