|
Margie2022
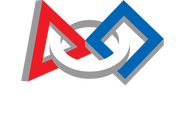
2022's robot, Margie, came prepared to compete in FIRST's challenge: RAPID REACT, sponsored by the Boeing company. Our robot was built with the capability of identifying two colors; red and blue. This function was used to collect cargo (color-coated large tennis balls), and the correct color was determined right before each match. After Margie obtains the ball marked for our side, it is then shot into a goal. Margie could also climb onto elevated bars and sustain stability in the air.
|
ScoringDrivetrainOperating InterfaceElectrical |
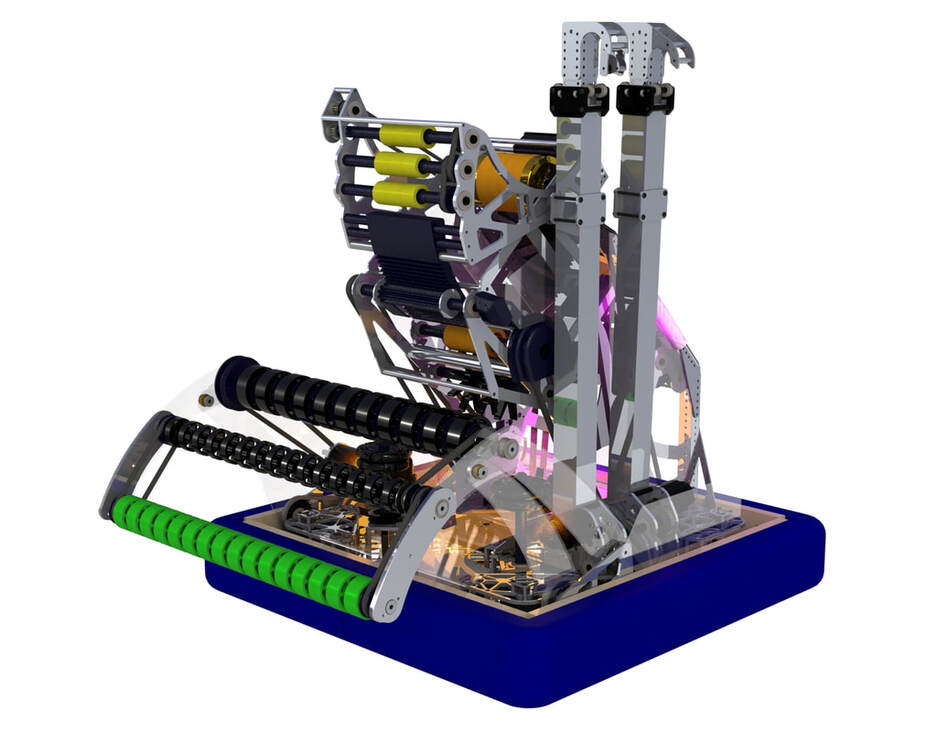
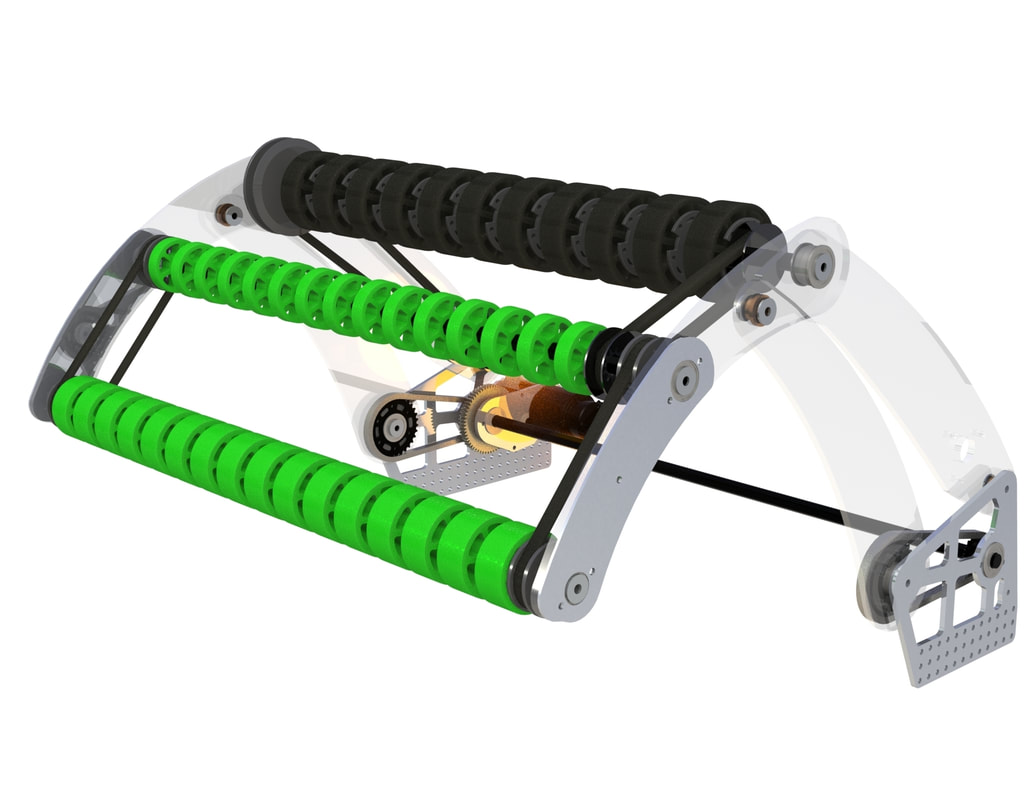
Our robot was able to collect and store the provided cargo, and climb to the traversal rung in the hangar in eight seconds. Margie's first mechanism is the three-roller motor actuated cargo ground intake. This is the first mechanism involved in the scoring of cargo. The indexer, or "pooper", would then sort them based off of the two different colors, allowing out robot to score efficiently and effectively. A wheel is then spun to bring the ball up into the shooter, which has an adjustable hood, allowing Margie to shoot from anywhere on the field. Along with the former, there is also a 3D printed gear backing, which provides balanced compression throughout the shooter. The shooter's back rollers provide balanced backspin to prevent the balls from bouncing out of the goal.
Our drivetrain is made using the SDS Mk4i Swerve modules with a 16 ft/sec maximum speed, and rotatable wheels. Our drivetrain enables us to go in any direction on the field with extreme speed and dexterity. The pocketed belly pan provides structural support and mounting space for most of the electronic components without compromising on weight savings.
The robot drives and operates using xbox controllers. The Controller's joystick controls the robot's rotation, and the Operator's controls the robot's movement, letting us aim towards the goal while maneuvering away from defense. This was used to intake balls, and tell the robot when to shoot. The robot also uses a camera to see the other side of the playing field to search for more cargo.
This year’s robot saw interesting electrical changes from previous seasons. We switched from pneumatics on our robot to relying solely on motors. This meant that mechanisms which have commonly been used with pneumatics, such as our intake, had to change their power transfer to use rotation in the motors. In addition, we used a Limelight 2+ camera to find the distance from the goal, and aimed the shooter accordingly.
|
Achievements |
Hueneme Port:
Sacramento Regional:
|
Silicon Valley Regional:
Hopper Division:
|
cad & code
Margie


Scouting whitepaper

|
|

|
|

|

|