Limestone
2026
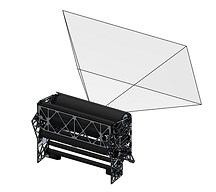
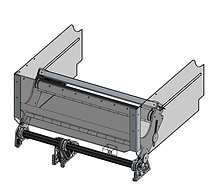
Limestone, our 2026 two-time district-winning and Milstein Division champion robot, competed in REBUILT, presented by Haas. Earning a place on the Einstein Field, Limestone was able to efficiently intake and score fuel, as well as complete other game objectives with speed and consistency. Additionally, Limestone was able to climb to Level 1 of the tower with ease and featured strong autonomous routines, helping us win two autonomous awards and achieve success throughout the season, competing among the top teams in the world.
scoring
Limestone's full-width slapdown intake pivots using a compact max spline gearbox powered by a Kraken X60 motor, providing a responsive deployment system while minimizing packaging space. Game pieces are acquired using a 2” silicone-covered carbon fiber roller paired with a 1.25” carbon fiber kicker bar, allowing balls to be quickly accelerated into the robot by two Kraken X60 motors. Two hex shafts sleeved with 0.625” carbon fiber tubes and supported by 3D-printed idler spacers help guide balls through the intake while preventing them from recontacting the main roller after acquisition. A 1/8" thick 2" x 1" aluminum crash bar takes impacts alongside the SRPP plates, which are hot-swappable. The roller floor uses five 1" dead axle rollers and three 2" flex wheel rollers to maximize bps. The three dead axle rollers located toward the intake are minimally slanted over the intake pivot. As you progress toward the shooter, there are three flex wheel rollers at a must steeper angle to minimize keystoning and maximize through-put. The final two dead axle rollers are located closest to the shooter and follow the path of the ball through the feeder roller. All dead axle rollers are made of carbon fiber covered in silicone, run on metric bearings on stud of hex shaft that were rounded down to still provide wrench access for torque. The power transfer goes from one x60 to the foremost live axle at a reduction of 3:1 for the live 2" rollers and 1.5:1 for the 1" dead axle rollers The roller floor is mounted to the shooter in the back through rounded down hex stubs to allow it to pivot for electrical access. Toward the intake, the 1" by 1" cross tube rests on hardstops mounted to the swerves. On one side the hardstop extends up to provide a whole for a pin that goes through the 3/16" plate and into the hard stop to keep the roller floor down at all times during a match.
Ball Tunnel/shooter
The shooter this year is designed to rapidly and accurately launch fuel into the hub. The shooter is the full width of the robot, with the side plates mounted to the inside of the drive rail, 25" apart. The shooter side plates are made of 3/16" aluminum that was precisely machined in our shop. The ball tunnel is designed to take all the the balls from the roller floor and accelerate them to about 70% of the shot speed. The ball tunnel features two Kraken x60s and has an active backing composed of 1.25" dead axle rollers. These dead axle rollers follow the path of the feeder roller until the ball is traveling vertically. The feeder roller itself is 2" in diameter and is powered by a separate x60. Moving up to the shooter, the 3.5" aluminum shooter drum is coated in skateboard grip tape as opposed to the silicone that covers all other rollers on the ball tunnel. The shooter drum is mechanically linked to the three hood rollers, which is covered in the skateboard grip tape. The drum and hood together are powered by four Kraken x60s to ensure we can ferry from the opponent zone. The hood itself is powered by a x44 and transmits torque across the robot through a jackshaft to allow us to shoot from a wide range of angles.
Drivetrain
Limestone's drivetrain is 27" by 27" and uses the SDS MK5n swerves to maximize space for the ball path while remaining agile. It uses a 1/16" pocketed bellypan to save weight while supporting the battery and electronics which can be easily accessed by pivoting the roller floor upwards. Beneath it, each side is also braced with plastic strips to allow the robot to go smoothly over the bump. The bumpers attach to the drivetrain with WCP cone mounts and feature polycarbonate walls which contain and support the expanding hopper.
Hopper
This year, the hopper had two parts: a horizontal extension with the intake and a vertical extension attached to the climber. The horizontal extension was made of 1/8-inch polycarbonate on the sides and dual-wall corrugated plastic on the front, with bent metal corners VHB and riveted together. We used 1/2-inch slots on the side plates to interface with a 1/2-inch metal standoff and a 1/16-inch thick and 2-inch diameter washer. The intake and output actuation is controlled by the slanted vertical slot on the side that interfaces with the intake plate. This uses a custom standoff with a flange that is tapped for a 1/4-20 bolt and bolts from the inside of the intake plate. For the horizontal extension, we had two .75x.75-inch tubes attached to the climber, which had four rivnuts on the top that hold down a piece of dual-wall corrugated plastic that is bent in the back to retain the balls on the shooter side of the robot. The up down motion is controlled by a chain drive system that uses #25 chain and one Kraken x60.
Operating interface
Similar to previous seasons, we run a single driver setup with Xbox-style controllers. The driver uses one controller to control all normal robot functions. Joysticks are used for drivetrain control, and the buttons and triggers are used to trigger various sequences like scoring, intaking or climbing. In order to fit the many functions of our robot onto one controller, our software takes care for as much of robot function as possible, handling things like shot alignment or targeting for example. We also map several robot functions to rear buttons accessible while operating the drivetrain, ensuring that are driver can maintain control of the joysticks throughout the match. In order to communicate shifts to the drive team, we do the math in our software and display the results on our Elastic dashboard, along with numerous other data coming from our various sensors that serve as debug information in the case that something is wrong during a match.
Electrical
This year, we had a total of 21 Kraken motors on our robot, including both x60s and x44s. These were distributed along many mechanisms, however 9 of those motors were concentrated in the shooter mechanism (including the ball tunnel and feeder roller). In terms of sensors, we had one Limelight 4 on the back face of our robot for vision, as well as two CANranges (one in the hopper and one in the shooter). We had one CANivore this year, which had the majority of the CAN components on it, besides for the two intake roller motors, which were run on the RoboRIO CAN loop. We also used the Power Distribution Panel 2.0 to power all of our components, in addition to two Mini Power Modules from REV. One of the major changes that we made this year was making our CAN loop with little to no solder joints or other connectors, so each wire went directly from one component to another without any breaks in order to reduce possible failures. We also added service loops for the wires on all of our components, so if something were to break at the component itself it would be easily fixable.
Achievements
Half Moon Bay District:
-
District Winners
NorCal District Championship:
-
DCMP Finalists
Sacramento District:
-
District Winners
Milstein Division:
-
Division Winners
Cad & Code
Limestone
Scouting whitepaper and Strategy Release

Our Scouting Whitepaper can be viewed here.
The Github Repositories can be found in the Whitepaper.
Strategy Releases: