The long weekend at the end of build season is always a well-appreciated opportunity to push hard to get things done. Even with it, we're nervous for the upcoming event.
Intake Testing (Pinball Wizard)
Ajay pulled out the old Pinball Wizard intake on Saturday (which is miraculously still together) and did some testing with the intake angled down at about 60 degrees. It worked, but it wasn't incredibly inspiring. We probably won't be playing with this much more before Port Hueneme.
| | |
Intake Troubles (Comp)
The latest rev of the Everybot intake picks up cones well enough, and we could make it work for cubes with some good driving. We also fixed the "vertical acquisition zone" problem of the old one by adding a strut that rides on the ground to keep the height of the cone rollers consistent. What doesn't work is the wrist. The belt that runs the wrist skips a few teeth every time it's retracted, eventually running the inline tensioner back into the gearbox. Re-tensioning is a 20 minute operation, and it needs to be done all the time. This is unsustainable, and will probably kill us at Port Hueneme if we don't get it fixed.
Climb troubles
One of the things we changed from Beta to comp was reducing the reduction on the arm. The original arm had enough torque to do serious damage to itself, so we removed a MaxPlanetary stage from it. It has plenty of torque to lift game pieces and do its curl... or so we thought.
Because the arm pivot is further into the robot than the wheels are, when it climbs the wheels get pushed into the ground. This pushes the robot, forks, and partner robot up a bit (and scoots our robot in towards the platform). The original arm had enough torque to push through all this, but the new one doesn't. We can make it work by climbing with a gap between the bumpers and the charge station, but this defeats the purpose of a last-second partner climb.
Because the arm pivot is further into the robot than the wheels are, when it climbs the wheels get pushed into the ground. This pushes the robot, forks, and partner robot up a bit (and scoots our robot in towards the platform). The original arm had enough torque to push through all this, but the new one doesn't. We can make it work by climbing with a gap between the bumpers and the charge station, but this defeats the purpose of a last-second partner climb.
Compounding this, there was a week zero competition over the weekend, which showed that triple balancing with random unpracticed partners is... actually pretty easy. We might not even need the forks week one. It's possible that we leave the arm as-is and ignore the fork climb at Port Hueneme. As with everything, this is TBD.
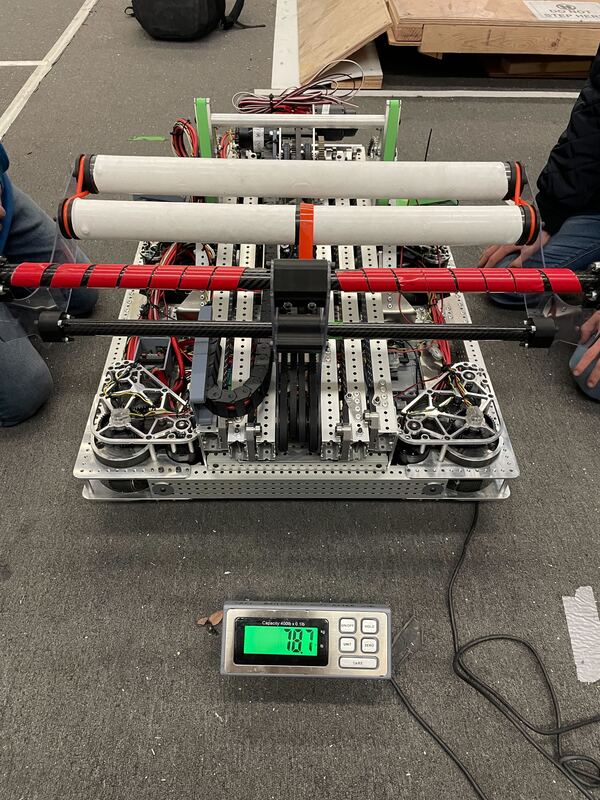
A silver Lining
With all this bad news, the mood is a little grim around the shop. The good news is that we weighed in at 79 pounds, which is completely bonkers.
 RSS Feed
RSS Feed