Software Successes
I haven't been posting updates from Software Robot often, but they have been working all season. (Note from the editor: I might go back and edit in some software updates for posterity.) Yi and the Software Robot team got Alpha running some auto paths (slowly), which we should be able to speed up for Beta. Cameron also worked to speed up our auto-leveling routine, which is now about 2 seconds from scoring position to level.
Localization using Apriltags and the Limelight has been a struggle, but Mehul made some serious progress this weekend. Here are some problems and solutions that we ran into:
Localization using Apriltags and the Limelight has been a struggle, but Mehul made some serious progress this weekend. Here are some problems and solutions that we ran into:
| Problem 1: The varying levels of light in the room were affecting the reading of AprilTags, resulting in the robot's position teleporting across the limelight tool as the robot could not distinguish the AprilTag. Solution: Added a blocker that encompasses the limelight in order to ensure no other light was affecting the Limelight 3 when it was reading the AprilTag (ignore the watermark I made). Problem 2: Though smooth on AprilTags 7 and 8, the Limelight 3 had trouble tracking position solely off of AprilTag 6. Attempt 1: Changed out AprilTag 6 for a printed version as the original had some marks on it (effect was negligible) Attempt 2: Tuned values to account for this (still in process) Video below shows progress on stabilizing the image! Though we weren't able to finish tuning, the image is more anchored than before -- the robot used to appear to teleport across the field. |  |
Beta Build
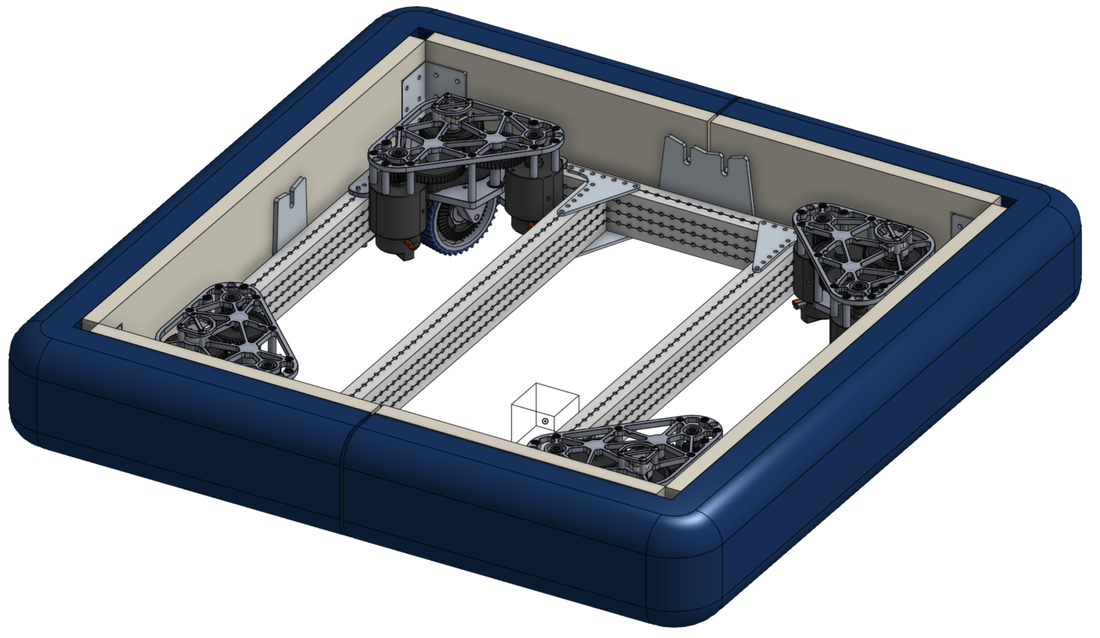
The Hardware Design and Hardware Fabrication teams are hard at work to build Beta. Beta will be our platform for development and drive practice until Epsilon and Comp are finished. By the end of Sunday we finished fabrication on a majority of Beta's parts, and assembly is well underway. We were far enough into the process that we could get our first weight check.
Chassis and Drivetrain: 49.3 lbs
Elevator: 17.2 lbs
Intake: 19lbs (!!!)
Chassis and Drivetrain: 49.3 lbs
Elevator: 17.2 lbs
Intake: 19lbs (!!!)
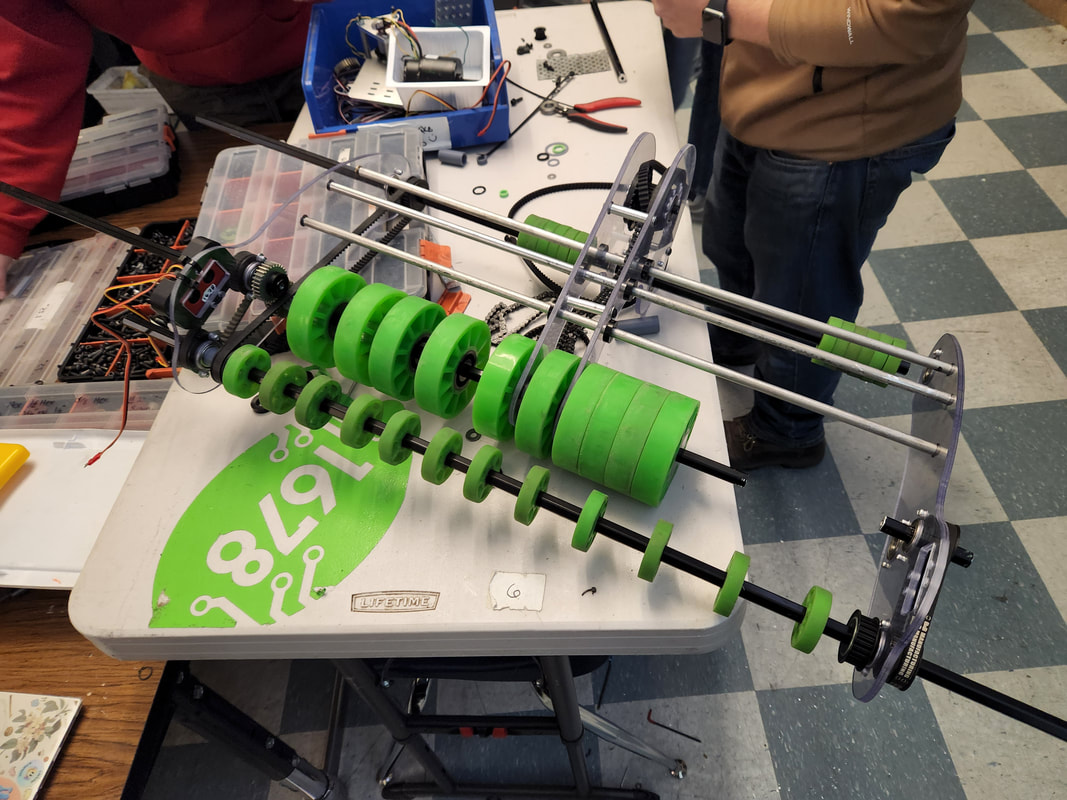
We clearly need to do something about the intake weight, but 85 pounds so far isn't a pad place to be at.
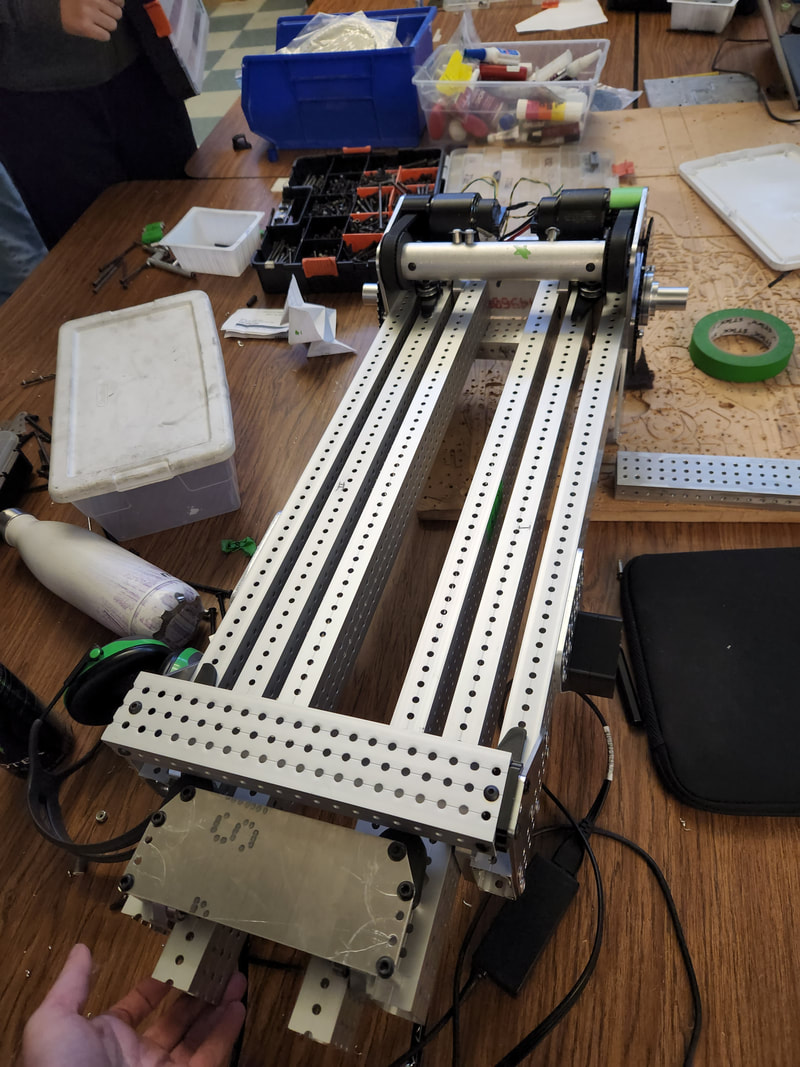
Epsilon (De)Escalation
Brendan and the Hardware Design team pulled a late night in Onshape on Saturday to bring Epsilon to life as quickly as possible. As of Sunday morning is has a drivetrain and half an elevator.
 |  |
In the harsh light of day on Sunday we looked at our resource loading, the state of Beta, and the timetable of bringing Epsilon to life. Ultimately, our design team is already pushed to their limits bringing Beta across the finish line. Doing a total architecture change starting in week 4 (with a competition in week 1) just isn't feasible. We'll be better served by optimizing Beta as much as possible and driving the wheels off of it. Hopefully we'll be able to bring Epsilon to Madtown Throwdown in November :).
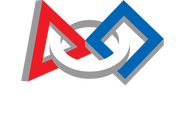
Beta 2? (R2B2)
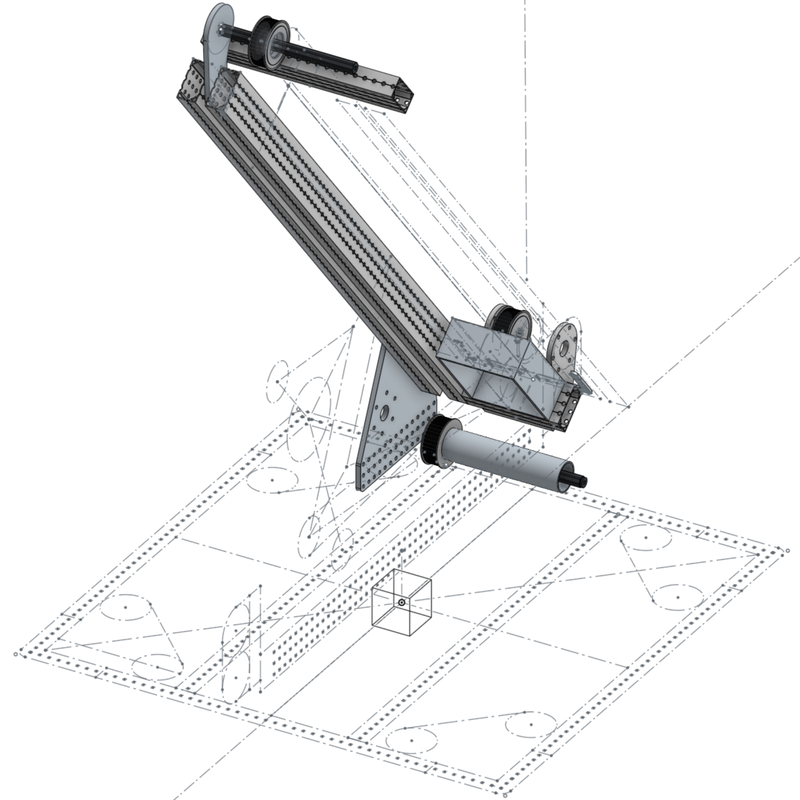
Just because we're setting Epsilon aside doesn't mean we're done with architecture changes. The biggest problem with Beta is that it has to keep the arm up high in protected zones or under defense. When we designed Beta we were using the Pinball Wizard intake, which is fixed to the elevator and has a reach of about 5 inches past the end of the elevator. Now that we're using the Everybot intake we have a wrist and extend over a foot past the elevator bar.
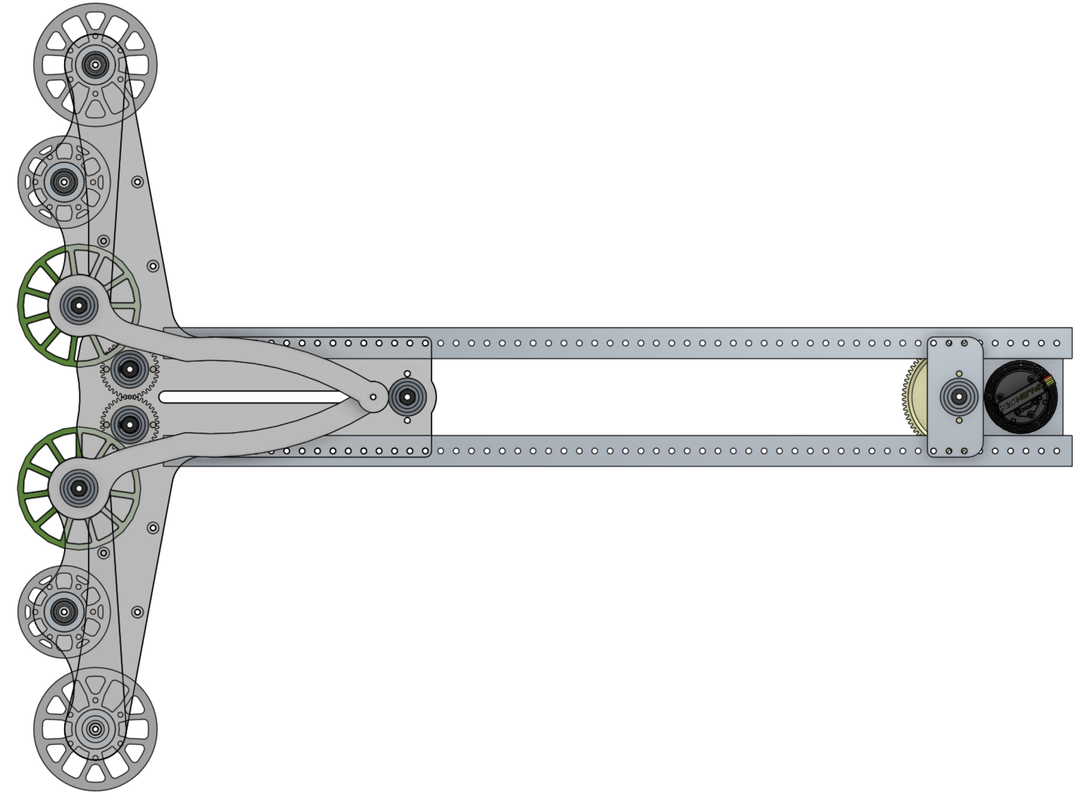 | 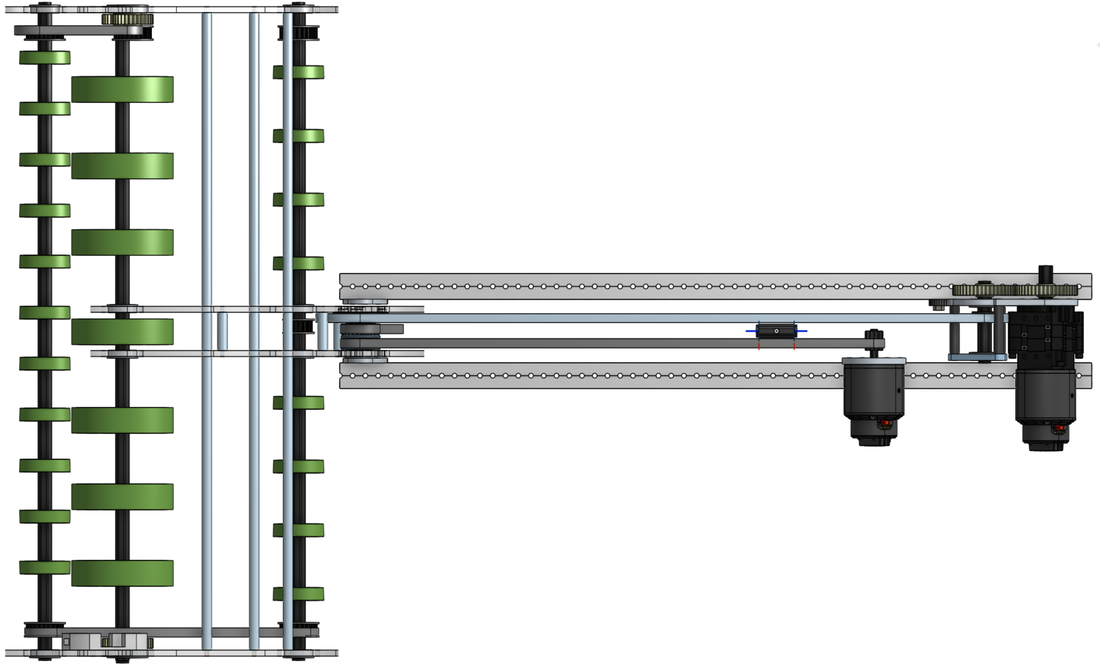 |
This means that we can shorten the elevator by 3.5" per stage, and that we can pull the wrist back to tuck fully into the frame perimeter with the elevator down. Beta still has one more degree of freedom than we'd like, but it's going to be easier to deal with the extra DOF than it will be to design a whole new robot.
Besides, Beta can do the highly important secret sauce long intake maneuver. What else do you need from a robot?
Besides, Beta can do the highly important secret sauce long intake maneuver. What else do you need from a robot?

 RSS Feed
RSS Feed