Robot Architectures
We've started exploring some robot architectures, looking for ways to reach the top scoring peg that are:
1. Fast
2. Low
3. Simple
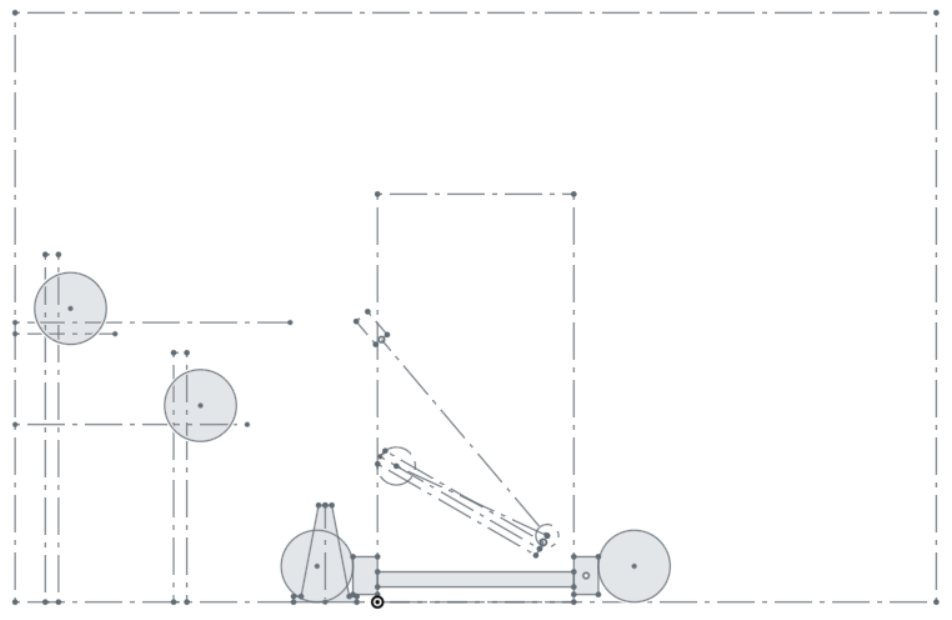
Heading out of Sunday, our leading design was a single-stage linear extension mounted to a high pivot on the back of the robot (Pictured Below). We think that robot needs an intake to bring game pieces into the robot, which then hands off to the arm. That intake would be mounted to a nonparallel four bar to stow under the arm.
1. Fast
2. Low
3. Simple
Heading out of Sunday, our leading design was a single-stage linear extension mounted to a high pivot on the back of the robot (Pictured Below). We think that robot needs an intake to bring game pieces into the robot, which then hands off to the arm. That intake would be mounted to a nonparallel four bar to stow under the arm.
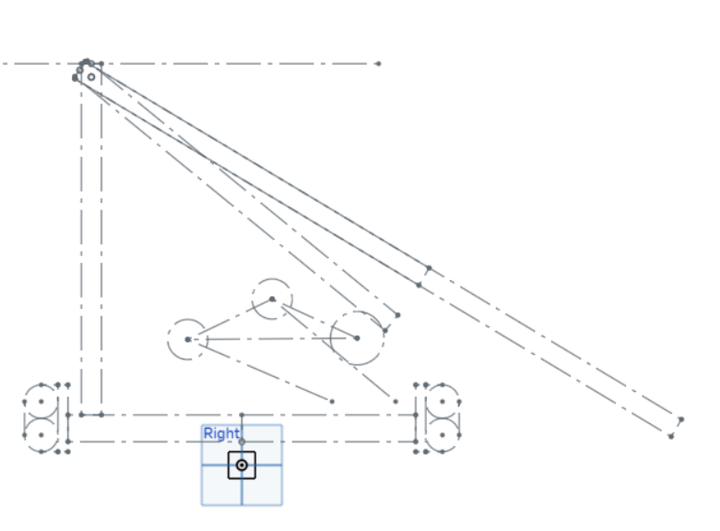
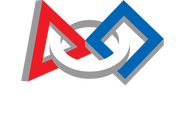
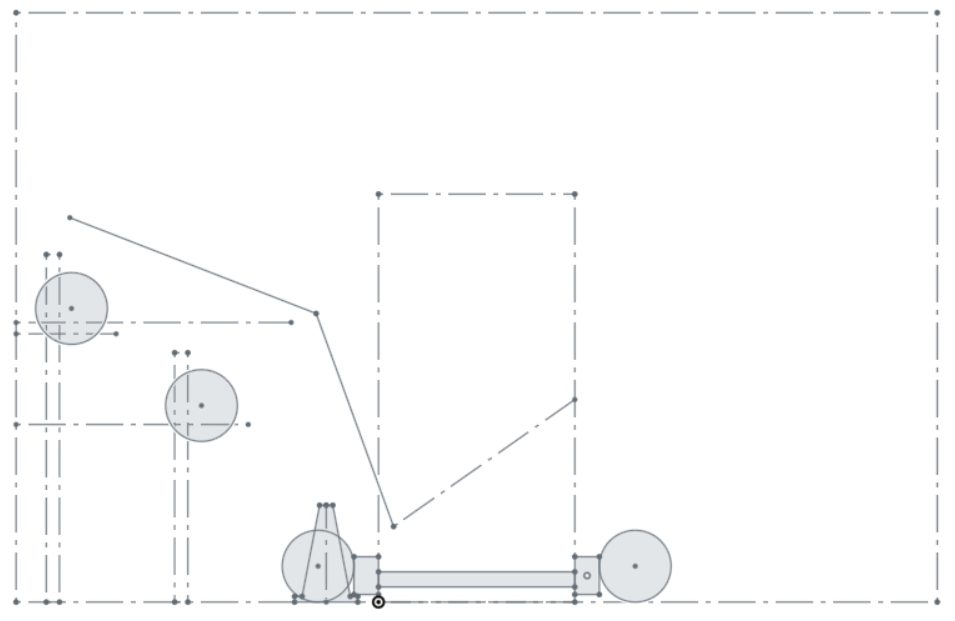
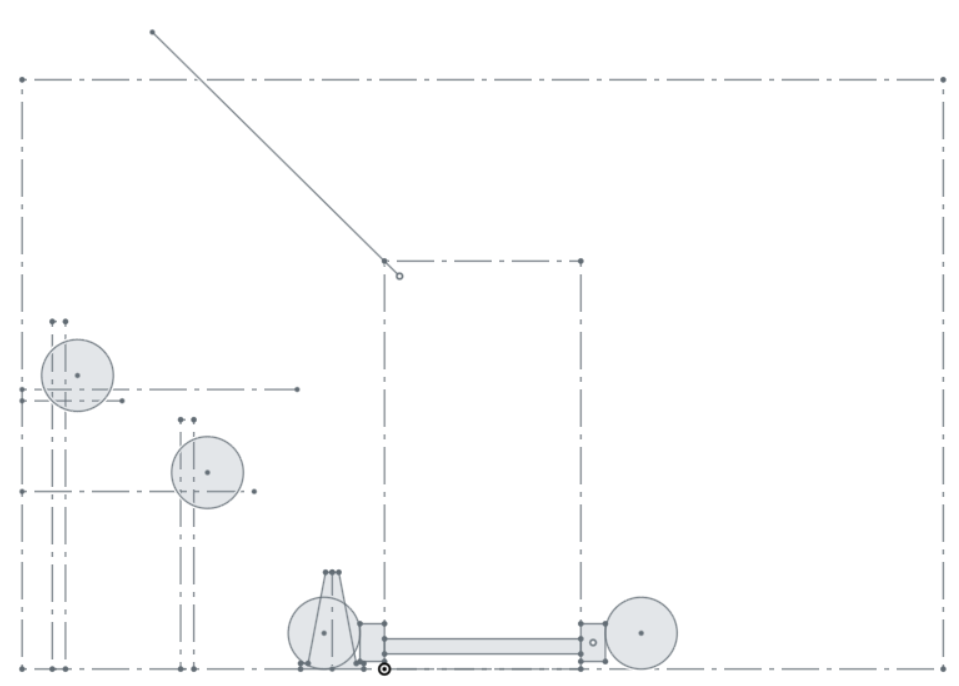
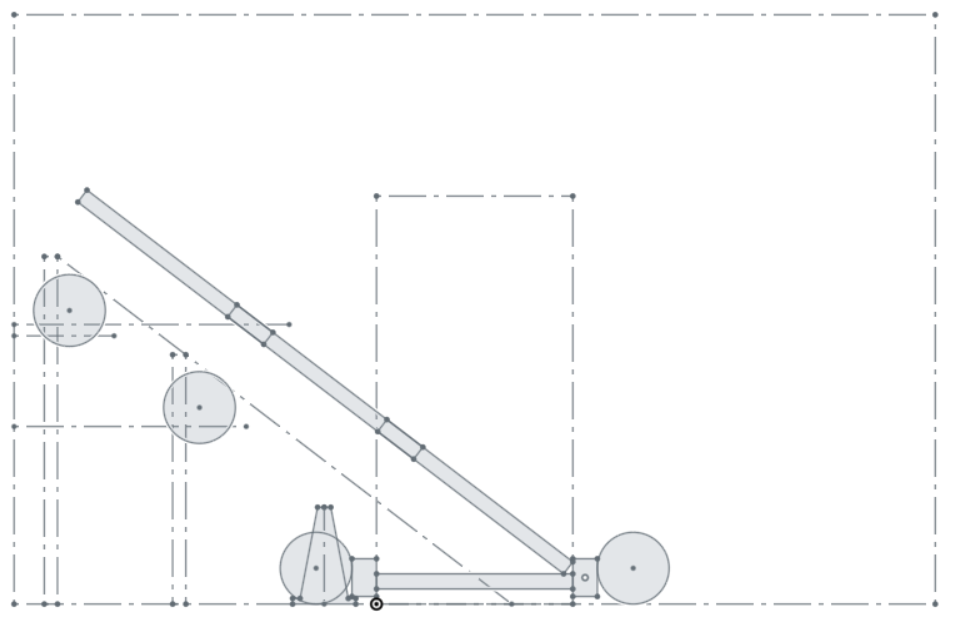
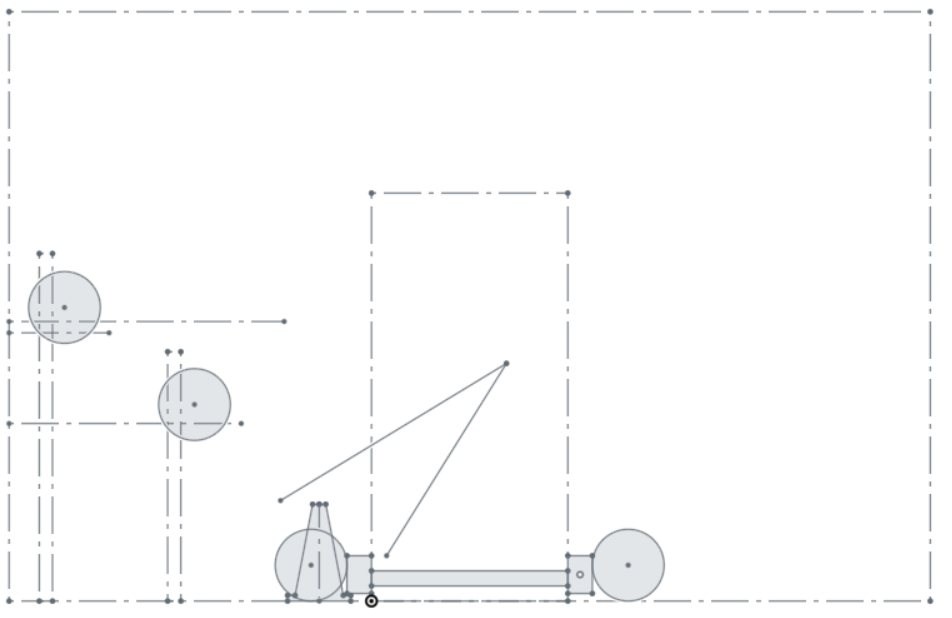
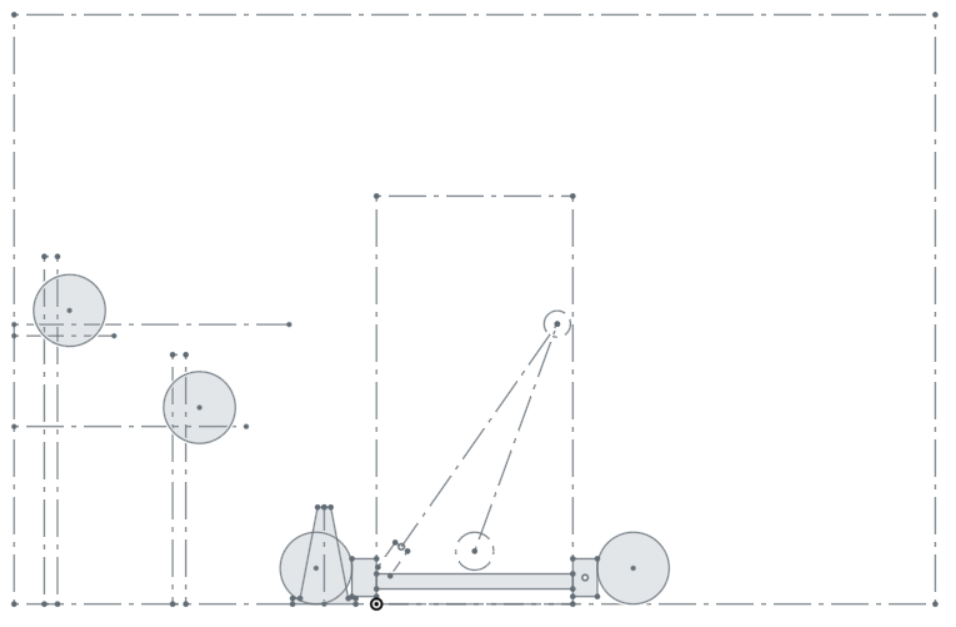
Heading into Wednesday though, we have a new plan. A low pivot on the back end with a three-stage telescope will let us stay low for most of the match, while still reaching the top peg. By mounting some long carbon fiber tubes off the top, we can use a partner as a counterbalance while we do a last second "curl" off the side of the bridge to climb.
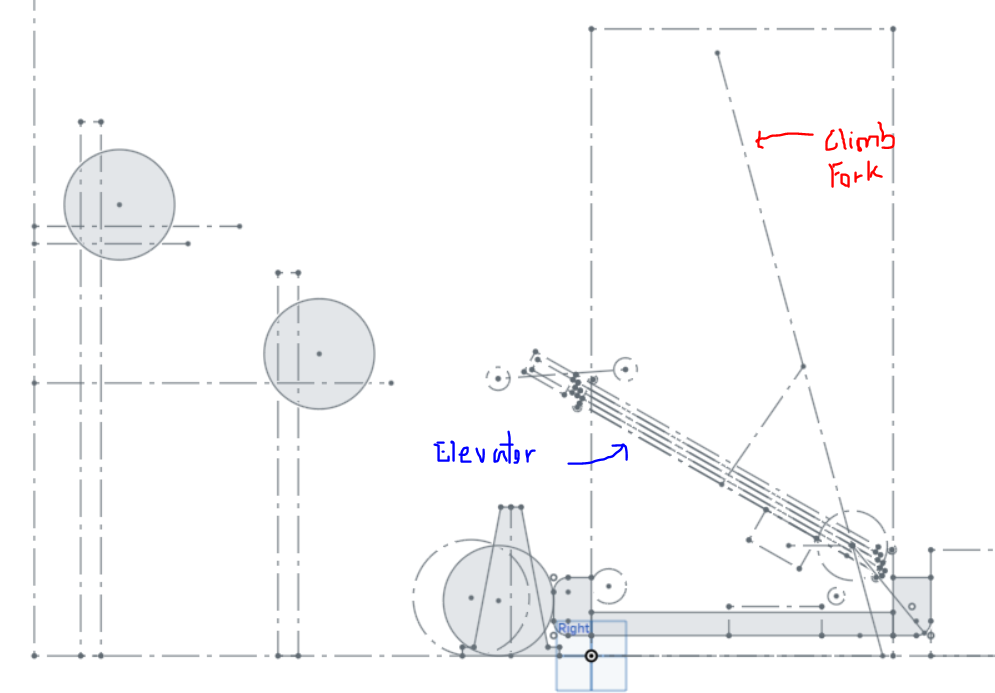
Some other architecture sketches are below, in no particular order.
The Plan for Alpha
Last season, we built an "alpha" robot early in the season. That robot let us get an early understanding of the dynamics of the game, start programming autos, and start driver practice. Alpha is intentionally not competition legal, and only needs to fill the requirement of playing the game. We are re-using 2022's Alpha chassis (even though it's pretty beat up) and will be ignoring starting configuration and frame perimeter.
Alpha's plan is based on our original architecture, but without the extension. The arm will be permanently illegally long, allowing it to score on the highest peg.
Alpha's plan is based on our original architecture, but without the extension. The arm will be permanently illegally long, allowing it to score on the highest peg.


Alpha will have Comp's high rear pivot, but the arm will be fixed at the fully extended length. This will make it a bit unstable, but we should be able to keep it light enough that it won't tip over. We plan to have Alpha running autos and cycles by day 10 (Jan 16th). This will also allow us to take off the fixed arm and put on the telescope if we chose to bring it into a competition-legal state.
Prototyping
Today is the first full day of prototyping. The team has been split up into six prototyping groups, each one with 1-2 student leads, 3-4 members from Hardware Fabrication, 1-2 members from Hardware Design, 1-2 members from Hardware Electrical, and 2 mentors. The groups are:

Group 1
Student Lead: Emma
Task: Over-bumper cube intake to handoff cubes to the arm.
Wednesday Progress:
Student Lead: Emma
Task: Over-bumper cube intake to handoff cubes to the arm.
Wednesday Progress:

Group 2
Student Lead: Brendan
Task: Alpha
Wednesday Progress: 2022 Alpha's chassis will work fine for this, so we got two bars mounted vertically with an axle running through them, and stole a gearbox from of our clone of 4414's robot in 2021 to run it. The gearbox is designed to clamp to a tube, so it was easy to move over to Alpha.
Student Lead: Brendan
Task: Alpha
Wednesday Progress: 2022 Alpha's chassis will work fine for this, so we got two bars mounted vertically with an axle running through them, and stole a gearbox from of our clone of 4414's robot in 2021 to run it. The gearbox is designed to clamp to a tube, so it was easy to move over to Alpha.
Group 3
Student Leads: Sam and Vamsi
Task: Build a manipulator for the arm that can right a tipped cone (Ri3D Redux)
Wednesday Progress: Simple linkage made from 2x4's. Probably too low-fidelity, it can grab a cone, but the axes of rotation of the wheels aren't in-line enough, so the cone doesn't rotate to position.
Student Leads: Sam and Vamsi
Task: Build a manipulator for the arm that can right a tipped cone (Ri3D Redux)
Wednesday Progress: Simple linkage made from 2x4's. Probably too low-fidelity, it can grab a cone, but the axes of rotation of the wheels aren't in-line enough, so the cone doesn't rotate to position.

Group 4
Student Leads: Daniel and Taye
Task: A wide wrist with a +/- 90° twist to pick up and re-orient cones.
Wednesday Progress: Built the first version. It has two axles made of alternating compliant wheels and star wheels, and the gap between them is adjustable. It sort of works, but needs to be made more rigid and we need to lock-in the separation between the axles.
Student Leads: Daniel and Taye
Task: A wide wrist with a +/- 90° twist to pick up and re-orient cones.
Wednesday Progress: Built the first version. It has two axles made of alternating compliant wheels and star wheels, and the gap between them is adjustable. It sort of works, but needs to be made more rigid and we need to lock-in the separation between the axles.
| Group 5 Student Leads: Kina and Michael Task: A spring-loaded side-roller intake to center and pick up cones and cubes Wednesday Progress: 7461's design from their OA thread looks great, so we did some eyeballing and modeled up our own. We laser cut and assembled it, and ran a few tests with Group 1's over-bumper intake. | |
Group 6
Student Lead: Big J
Task: A pop-out endgame support (frc1986 2012) and climb forks for something like a 148 2019 climb.
Wednesday Progress: Researched materials for the climb forks and looked at options for a bottom-mounted overhang assist mechanism.
Student Lead: Big J
Task: A pop-out endgame support (frc1986 2012) and climb forks for something like a 148 2019 climb.
Wednesday Progress: Researched materials for the climb forks and looked at options for a bottom-mounted overhang assist mechanism.
 RSS Feed
RSS Feed