Beta's First Cycles
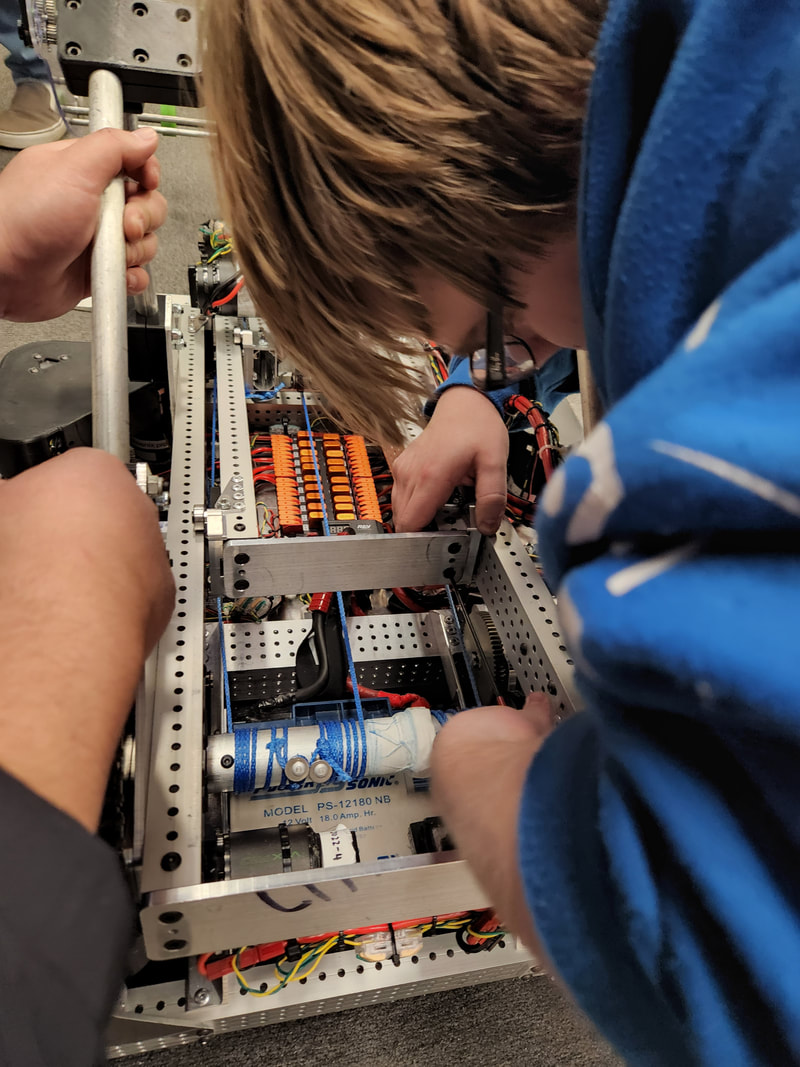
We ran our first few cycles with Beta today, which immediately exposed some flaws.
The biggest problem is the intake. In an effort to only use the belts we have on-hand, we ended up running a belt stage as 24:18 instead of 24:24 as planned. This "upduction" is causing the intake to hit its 40 amp limit while idling. It also takes about 5 seconds to get up to speed under a current limit, and browns out the robot. We drained our first battery in just four cycles. We're printing a new pulley tonight to swap the reduction from 24:18 to 18:24. That should allow us to cycle normally, but probably not to grab game pieces at full speed - we can live with that until Comp is ready.
The second problem is our weight distribution, as previously mentioned. With a heavy intake and solid aluminum climb forks, the inertia of snapping the arm down while moving causes the robot to wheelie dramatically as it backs out from scoring position. Comp will have a lower CG and a lighter intake, but that might not be enough to solve the problem. Getting the Software Robot team to slow down the arm lowering should help as well. It could move downwards at 20% its current speed without slowing our cycling.
We also backed out the screws that hold the plate onto the middle stage of the elevator, which will need loctite.
The second problem is our weight distribution, as previously mentioned. With a heavy intake and solid aluminum climb forks, the inertia of snapping the arm down while moving causes the robot to wheelie dramatically as it backs out from scoring position. Comp will have a lower CG and a lighter intake, but that might not be enough to solve the problem. Getting the Software Robot team to slow down the arm lowering should help as well. It could move downwards at 20% its current speed without slowing our cycling.
We also backed out the screws that hold the plate onto the middle stage of the elevator, which will need loctite.
 |  |
Shameless Theft
"Steal from the best, invent the rest," right?
Wildstang (111) has been doing an open build this year (one of the best of the season, and my personal favorite robot so far - check it out if you aren't already familiar). They posted their intake on CD on Saturday, and this thing is too good not to build one ourselves. Ours will have a few twists, of course. The 111 intake has to work both directions, which means it has to be symmetric. Ours doesn't.
Wildstang (111) has been doing an open build this year (one of the best of the season, and my personal favorite robot so far - check it out if you aren't already familiar). They posted their intake on CD on Saturday, and this thing is too good not to build one ourselves. Ours will have a few twists, of course. The 111 intake has to work both directions, which means it has to be symmetric. Ours doesn't.

| One of the big problems with the Everybot intake design is that cone pickup is very sensitive to changes in height. At exactly the right height, the tip of the cone gets sucked up between the front two rollers quickly and consistently. Move the intake up or down half in inch though, and it just knocks the cone over. With a shoulder, a wrist, and a polycarb intake, the intake bounces vertically quite a bit while driving. In short, the "vertical acquisition zone" of this intake is very small. | 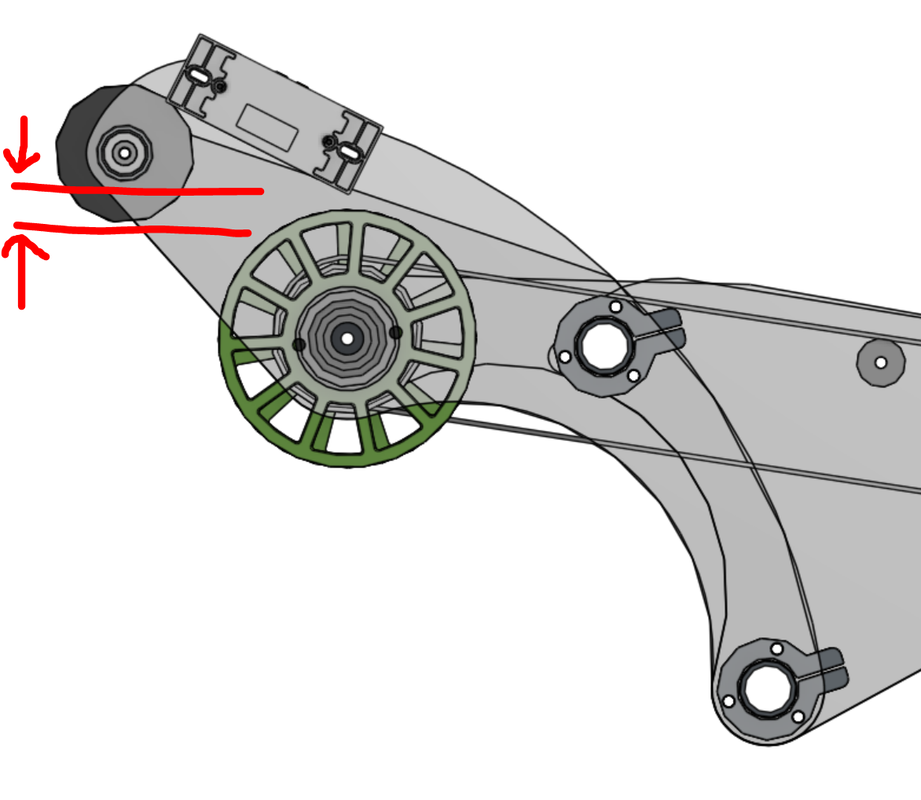 |
One of the easiest changes we can make to the 111 "french fry" to intake mitigate that issue is to extend the upper half of the belts. We will also be changing the intake to be full-width with polycarbonate dead axle rollers instead of hex shafts, and figure-eight belts instead of gears to keep the weight down. Our wrist will pivot from above the centerline of the intake to keep cones from stabbing into the pivot point, and to help it package easier. Comp will get the modified Everybot intake for now, and when Beta evolves into R2B2 it will get the French Fry (Wildfry? French...stang?) intake to compare against.
 RSS Feed
RSS Feed